Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 30
resultados
30
resultados
 Última actualización
19/07/2026 [06:58:00]
Última actualización
19/07/2026 [06:58:00]



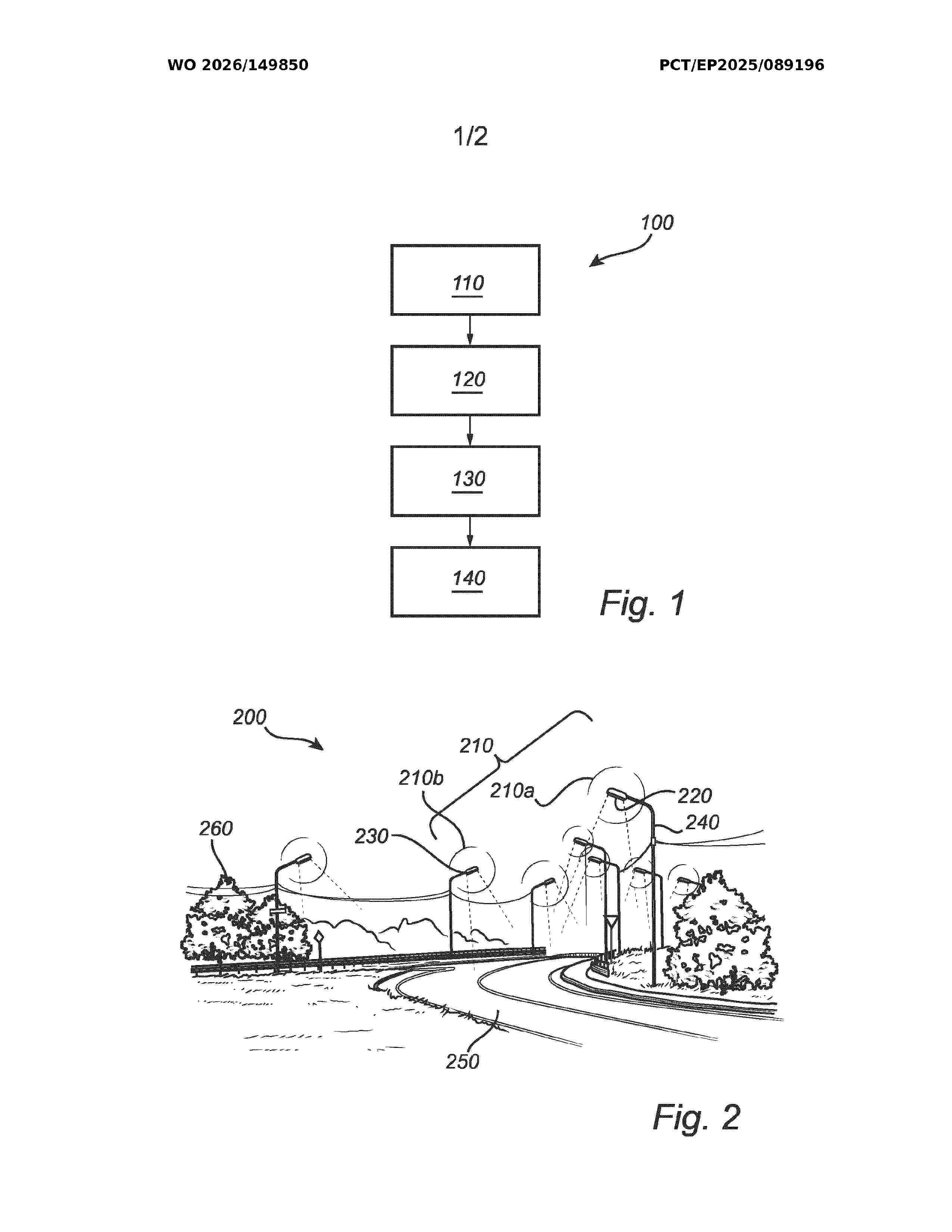
Resumen de: WO2026149850A1
A method (100) and a system (300) for selecting and/or configuring (140) at least two nodes (220, 230, 320) out of a plurality of nodes configured to perform radio frequency, RF, sensing, are provided. The plurality of nodes is distributed in an outdoor environment (200), and at least one node of the plurality of nodes is co-located with at least one lighting unit (210a, 210b). The method comprises obtaining (110) environmental information associated with the outdoor environment, and determining (120) at least one sensing task based on the obtained environmental information. The method further comprises obtaining (130) node information on a spatial property and/or a communication capability related to each node out of the plurality of nodes, and selecting and/or configuring (140) at least two nodes out of the plurality of nodes based on the determined at least one sensing task and the obtained node information.

Resumen de: EP4776259A1
The present application relates to the field of artificial intelligence, and in particular, to a method and an apparatus for recognizing a traffic accident, a system and a computer program product. The method includes: by a vehicle, obtaining multimodal data and performing a preliminary screening of traffic accidents according to the multimodal data to obtain related information of a suspected traffic accident; sending, by the vehicle, the multimodal data and the related information of the suspected traffic accident to a platform; determining a personalized driving habit of the driver by the platform according to the information of the driver of the vehicle, and determining historical accident information of the location according to the location where the suspected traffic accident occurs; and obtaining a recognition result of the suspected traffic accident by the platform according to the personalized driving habit of the driver, the historical accident information of the location, and the multimodal data. In this method, the historical accident information of the location where the suspected traffic accident occurs and the personalized driving habit of the driver are combined to perform analysis and recognition on the multimodal data to obtain a more accurate traffic accident recognition result, which is conducive to reducing false alarm and improving a vehicle travelling efficiency of motorcade.
Resumen de: WO2025051725A1
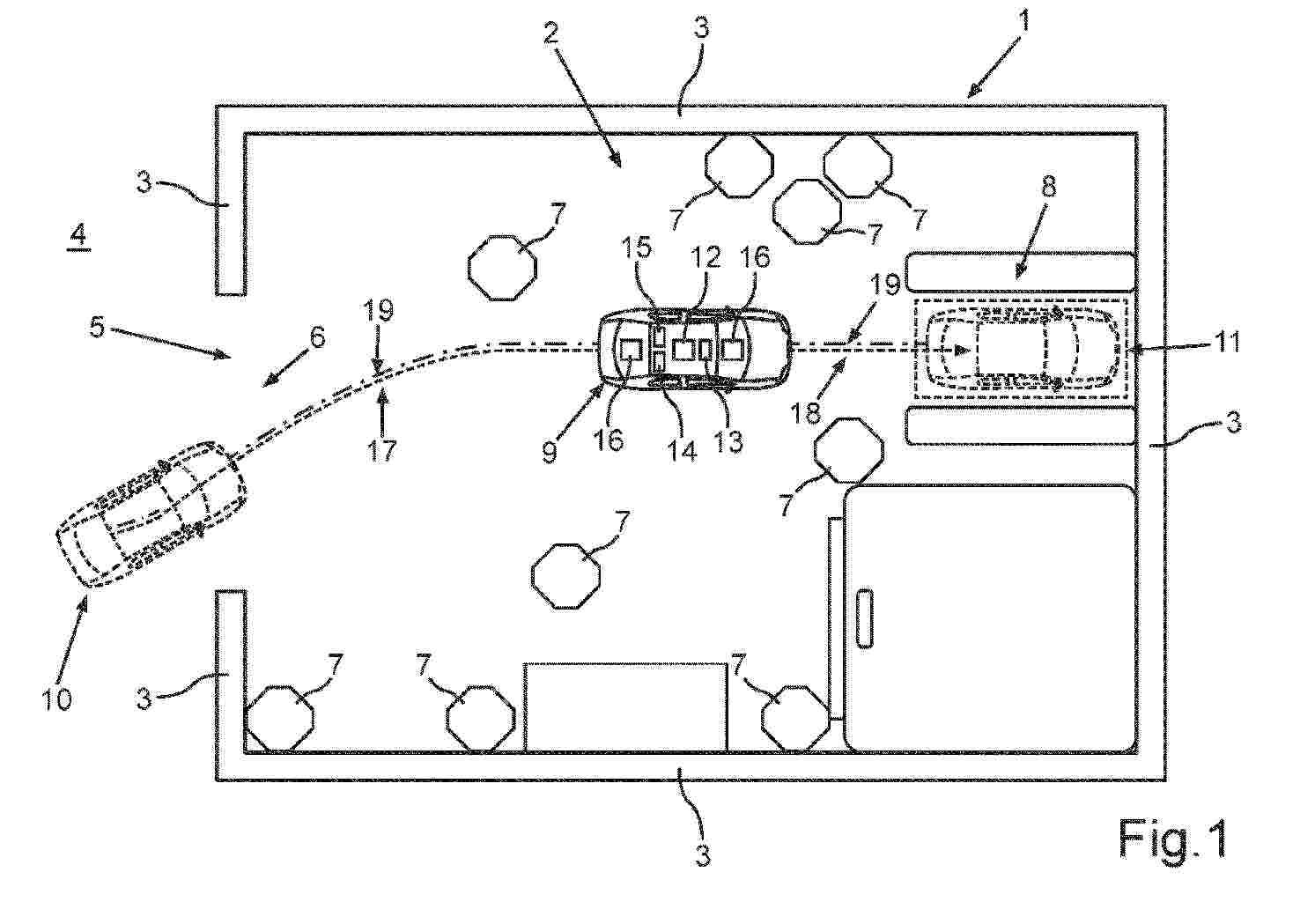
The invention relates to a method for training a subsequent journey trajectory (19) for a vehicle (9), comprising the following steps: - driving, with the vehicle (9), through a first route section (17) with a first degree of autonomy and recording the first route section (17); - driving, with the vehicle (9), through a second route section (18), following on from the first route section (17) with a second degree of autonomy which differs from the first degree of autonomy and recording the second route section (18); - determining the subsequent driving trajectory (19) from the recorded first route section (17) and the recorded second route section (18), wherein the subsequent driving trajectory (19) is created for the at least semi-autonomous driving of a subsequent journey. The invention also relates to methods and systems (12, 13).
Resumen de: CN121816763A
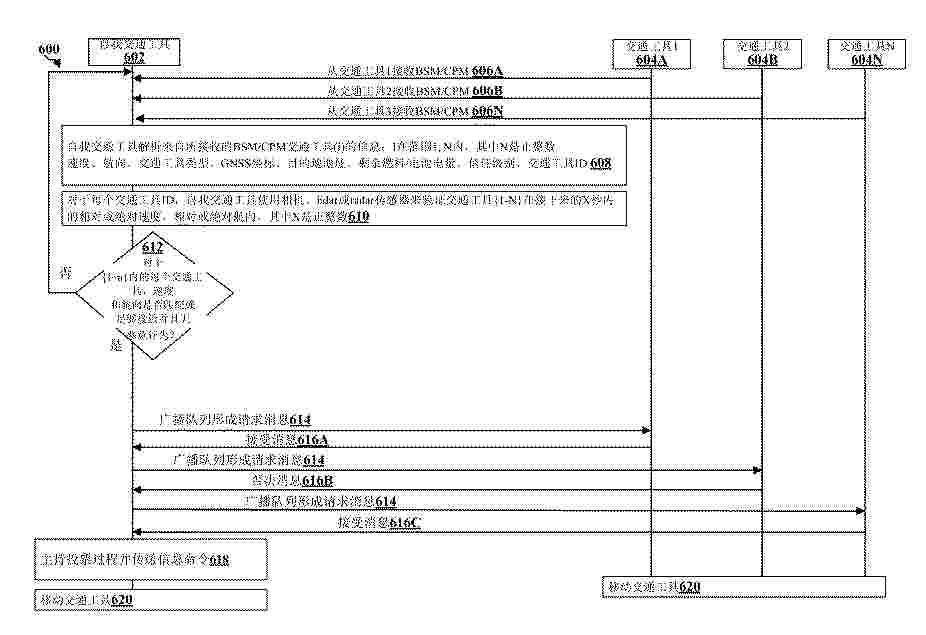
An apparatus, a method, and a computer program product for queue formation are provided. An example method may include identifying a set of non-malicious vehicles based on at least one of data associated with the set of non-malicious vehicles or communications from a second vehicle or an RSU. The example method may also include sending a request message to a set of non-malicious vehicles. The example method may also include receiving an acceptance message from at least one vehicle of the set of non-malicious vehicles. The example method may also include configuring a queue containing at least one vehicle of the set of non-malicious vehicles.
Resumen de: WO2026148198A1
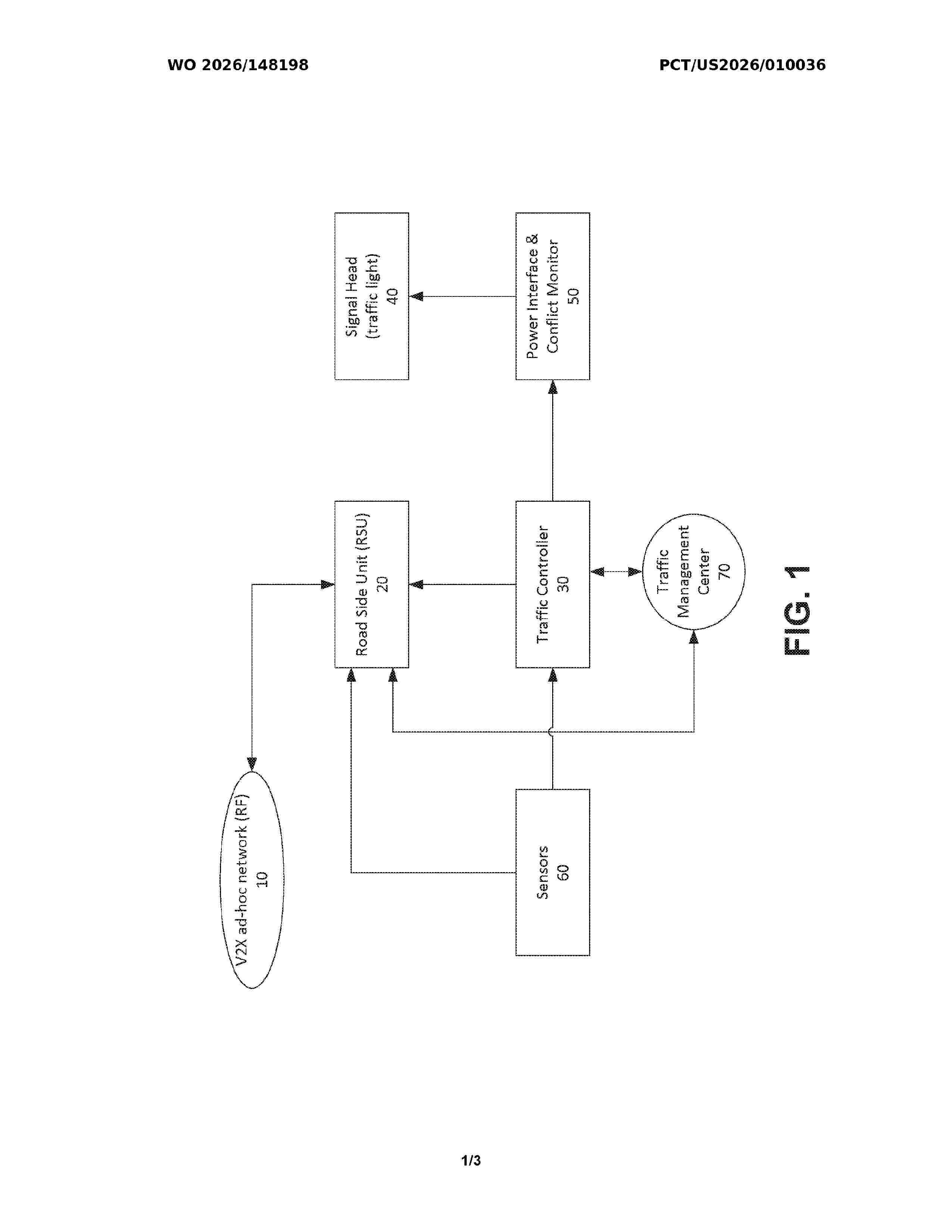
A system for monitoring signal conflicts in a traffic management system, includes: an integrated digital state monitor (IDSM) including a processor and a memory, the memory including computer-readable instructions that, when executed by the processor, cause the IDSM to perform operations including: receiving, from a traffic controller, a direct traffic controller signal, the direct traffic control signal indicating a status of a signal head perceived by the traffic controller; receiving, from a roadside unit, an RSU signal received by the roadside unit and relayed to the conflict monitor, the RSU signal indicating a status of a signal head perceived by the roadside unit; comparing the direct traffic controller signal to the RSU signal; and in response to the direct traffic controller signal being in conflict with the RSU signal, instructing the roadside unit to cease broadcasting a RSU broadcast signal.
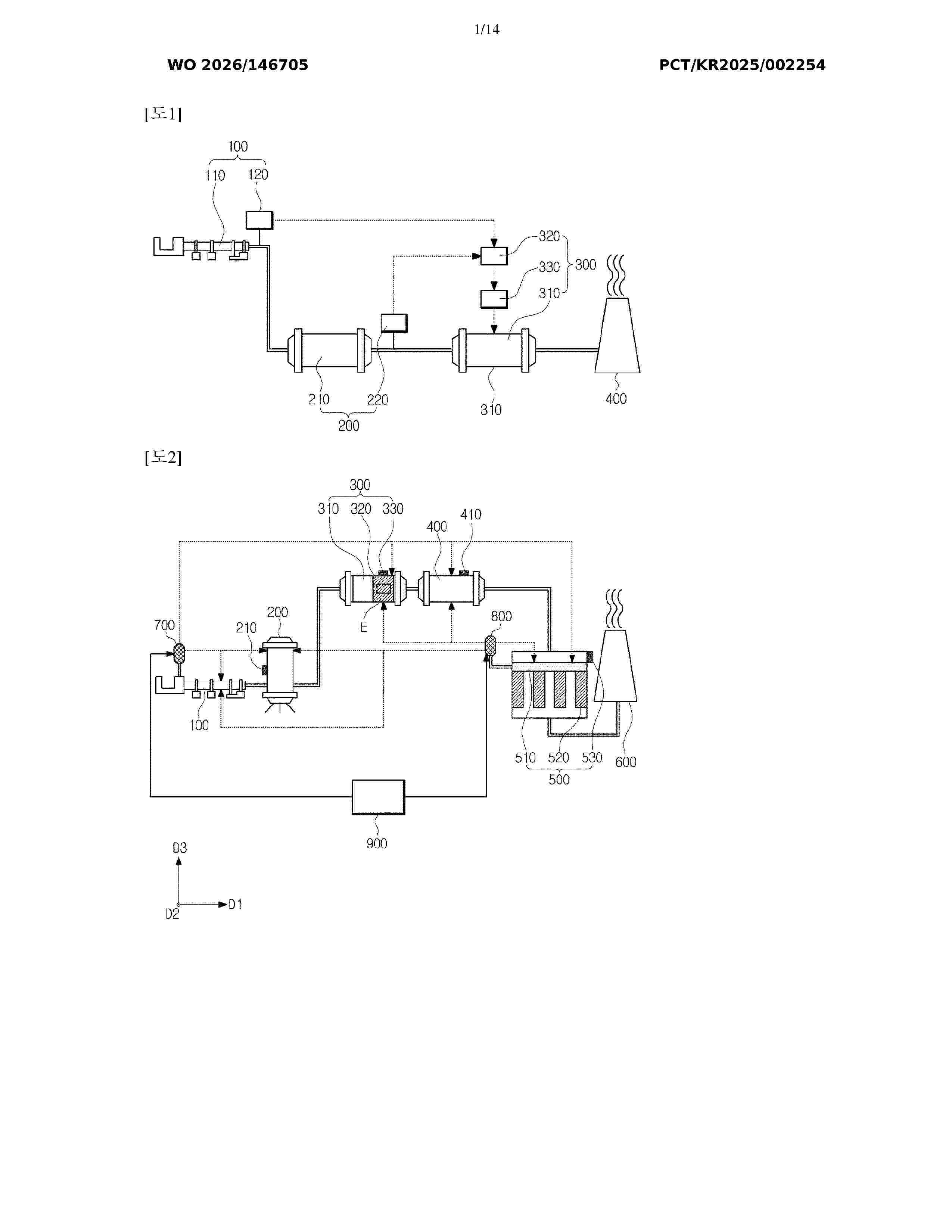
Resumen de: WO2026146705A1
An overall system for reduction facilities and road bridges, according to some embodiments of the concept of the present invention, comprises: a first reduction facility including an exhaust sensor and an SNCR facility; and a second reduction facility including a control unit, a spray nozzle and an SCR facility. The exhaust sensor detects a first reducing agent remaining after a selective non-catalytic reduction reaction with nitrogen oxides in the first reduction facility, the control unit analyzes the result of detecting the first reducing agent by the exhaust sensor, and an injection amount of a second reducing agent injected by the spray nozzle is controlled by the control unit according to the result of detecting the first reducing agent.
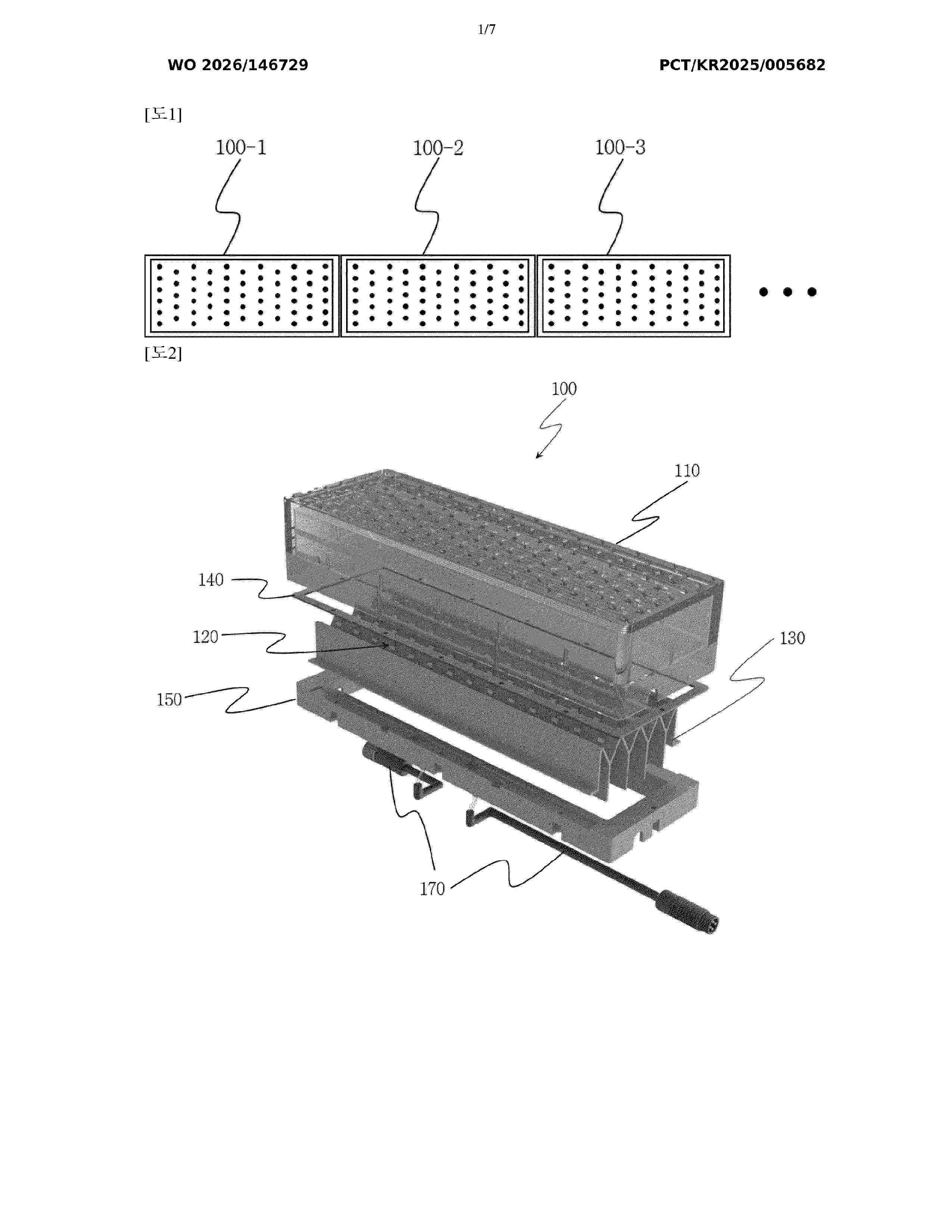
Resumen de: WO2026146729A1
Disclosed is an in-ground pedestrian traffic signal module. The in-ground pedestrian traffic signal module comprises: an upper housing through which light passes; a light source accommodated in the upper housing; a heat dissipation structure in which the light source is disposed and which dissipates heat generated by the light source; a lower housing which accommodates the lower part of the heat dissipation structure and is coupled to the upper housing; and a filler material which fills the inner space of the upper housing and through which light passes, wherein the heat dissipation structure has an inclined surface on which the light source is disposed, and includes a cutoff part that extends from one side of the upper part of the inclined surface and is bent at least once so as to cover a portion of the upper part of the inclined surface. The in-ground pedestrian traffic signal is reliable, waterproof, and highly durable, and can reliably direct a signal light toward one side and block light from leaking to the opposite side.
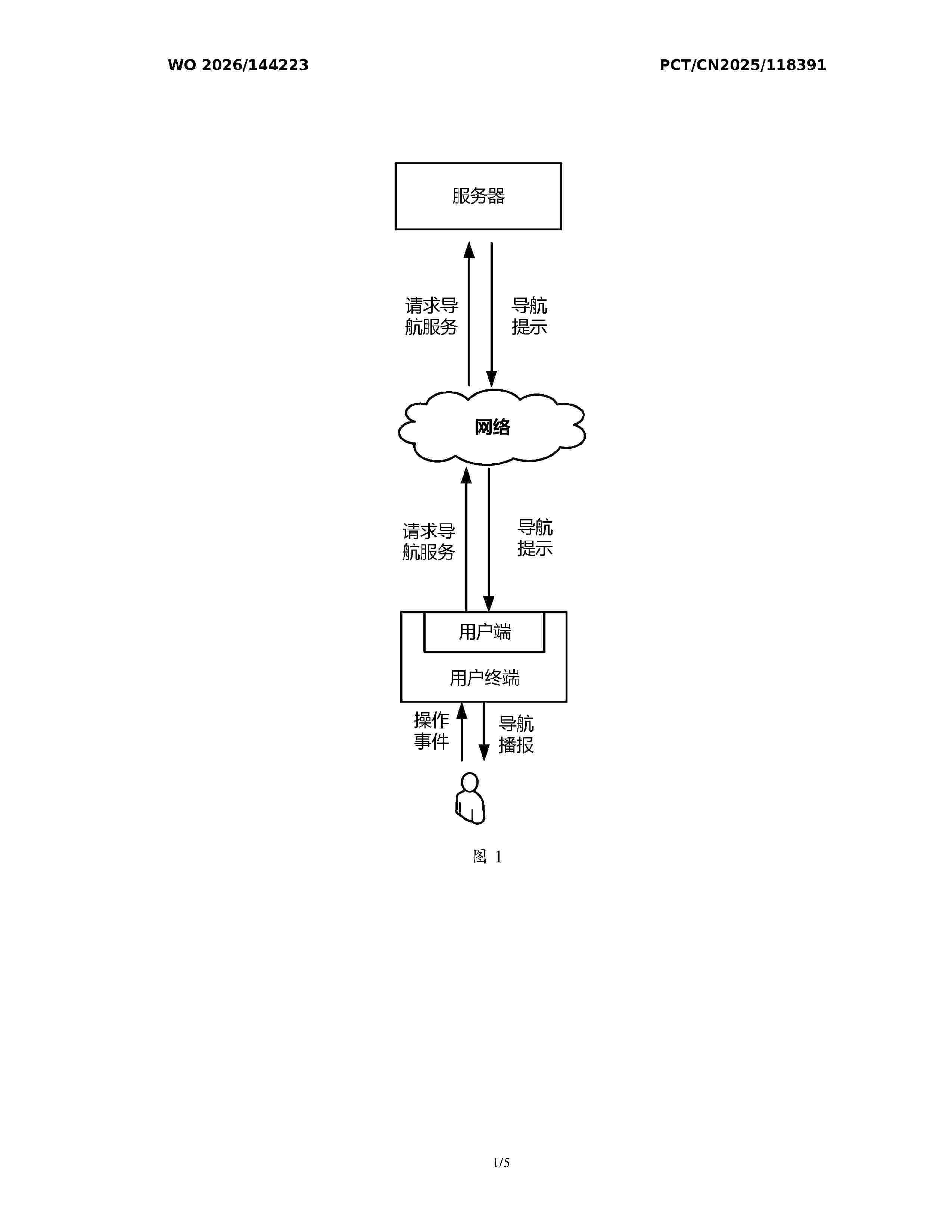
Resumen de: WO2026144223A1
A navigation prompting method in a traffic light scenario and a corresponding apparatus, relating to the technical field of navigation. The method comprises: on the basis of road network data, determining a queuing position of a target vehicle at a target traffic light at a current intersection (201); on the basis of the queuing position and traffic light timing data, determining an estimated motion initiation time of the target vehicle (203); and, on the basis of the estimated motion initiation time, generating motion initiation reminder information (205). Accurate navigation prompts can be provided to a driving user, facilitating prompt motion initiation by the driving user, and improving driving safety and traffic efficiency. In addition, such a mode does not require high dependence on perception capabilities, and can be implemented without a sensing device and a sensing system, resulting in low implementation costs.
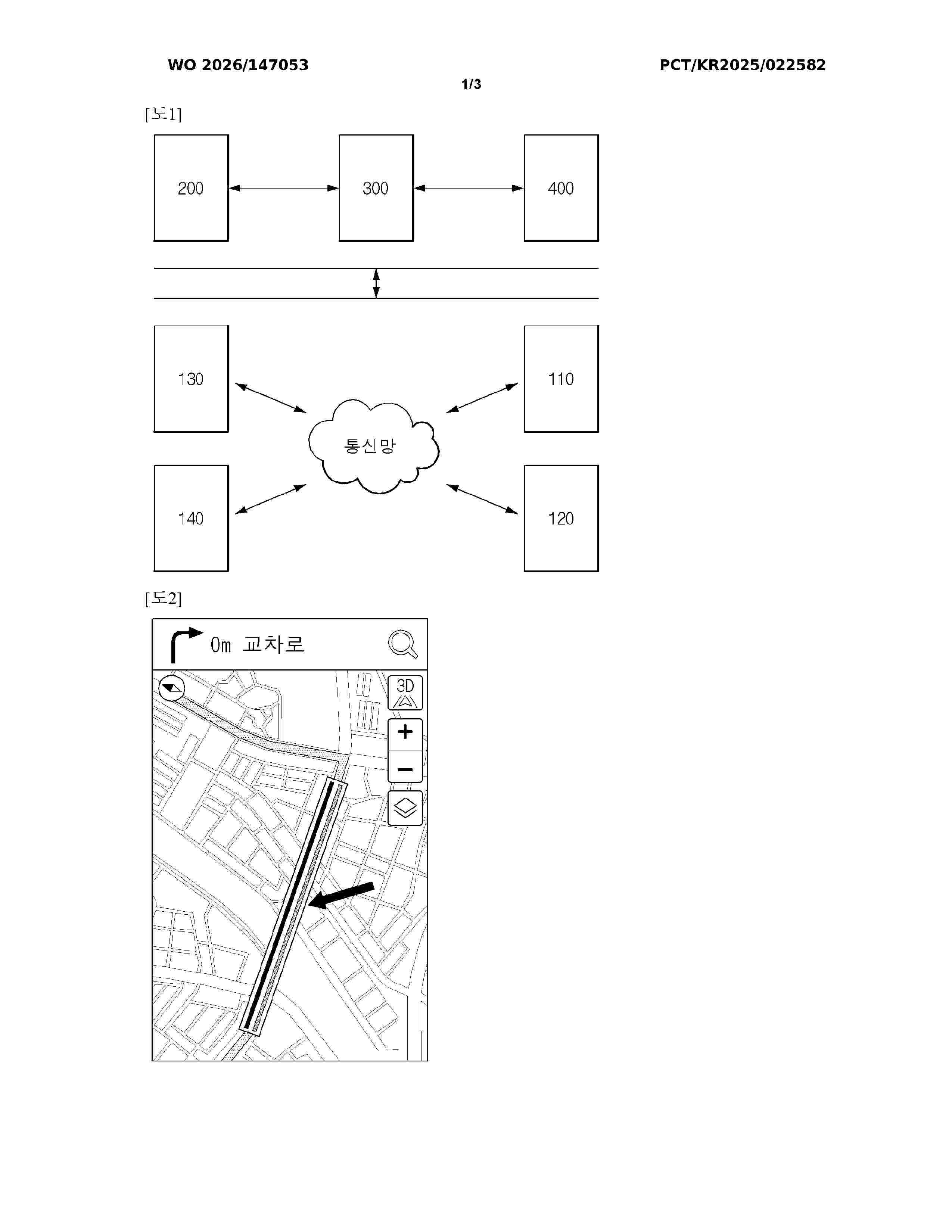
Resumen de: WO2026147053A1
The present invention relates to a technical field of traffic information processing for predicting lane-wise or multi-traffic flow of a road by utilizing an artificial intelligence model such as a deep neural network and a simulation model such as a stochastic agent-based model (SABM), and visually displaying same on a navigation system.
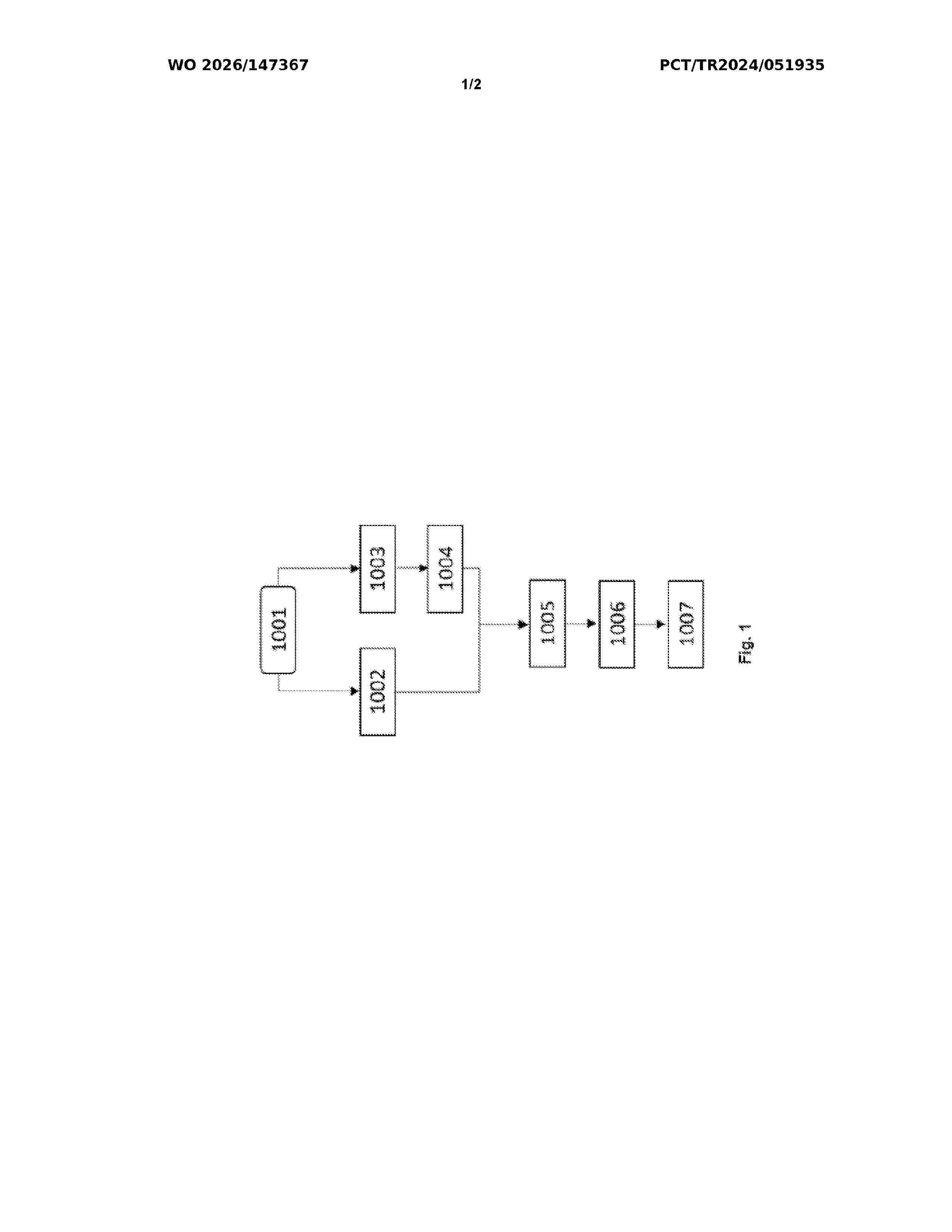
Resumen de: WO2026147367A1
The invention relates to improving traffic prediction, travel efficiency optimization and road safety in intelligent transportation systems by collecting traffic data from sensor networks and processing it with spatial-temporal data analysis methods and machine learning algorithms.
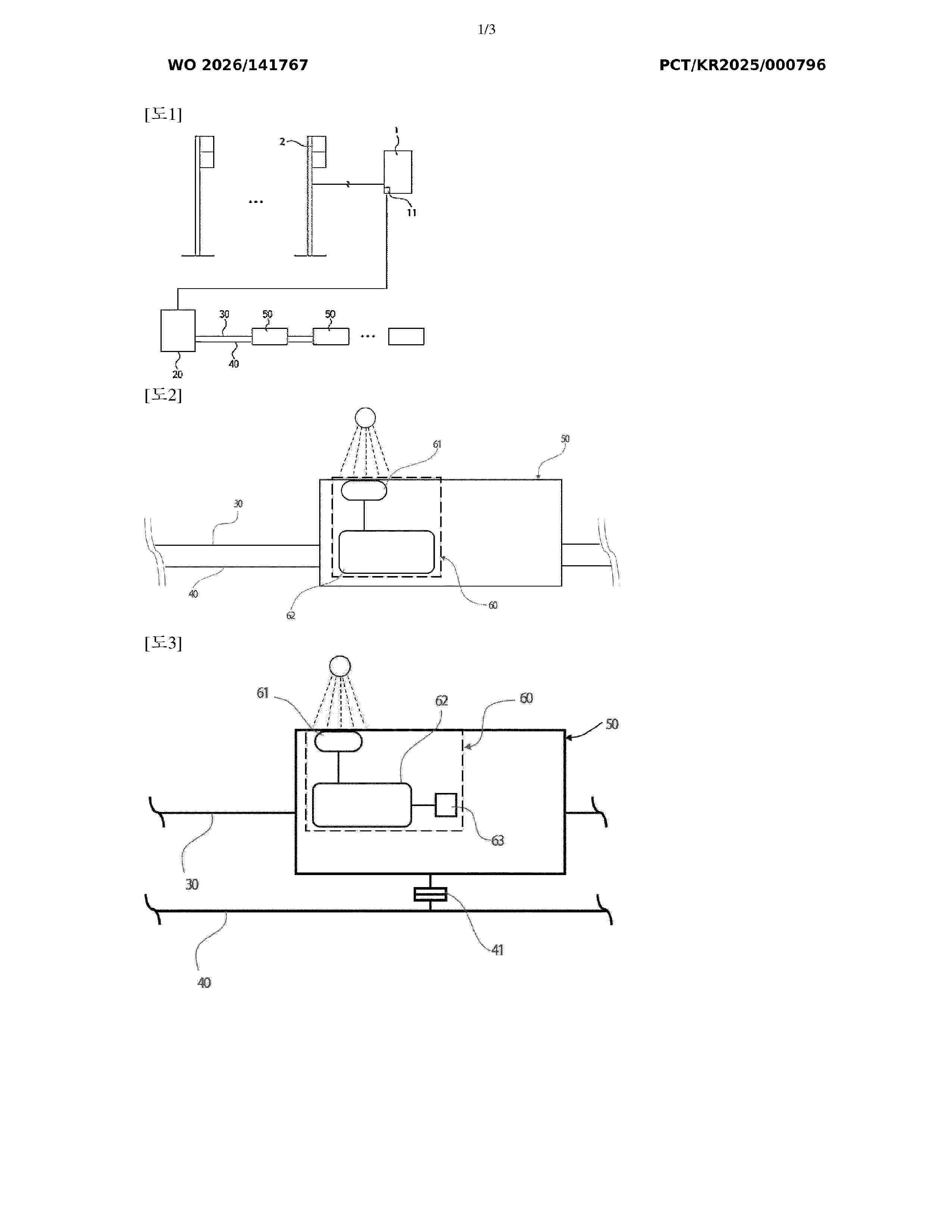
Resumen de: WO2026141767A1
The present invention relates to a safety display device comprising: a signal device controller provided to control an operation of a signal device according to reading of an operation signal of a road traffic light, such as a vehicle traffic light or a pedestrian traffic light, from a road signal reading unit; a serial communication cable provided to allow the signal device controller to communicate a control signal for the operation of the signal device to the signal device; a CDSID signal device provided to be turned on in conjunction with the road traffic light, wherein the CDSID signal device includes a CDSID communication unit which receives an ID coding signal in the form of light from the outside so as to allow ID assignment and operation coding; and an ID optical coding input device for assigning an ID and inputting operation coding to the signal device from the outside through the CDSID communication unit so that an external optical signal is input to and set for the signal device.
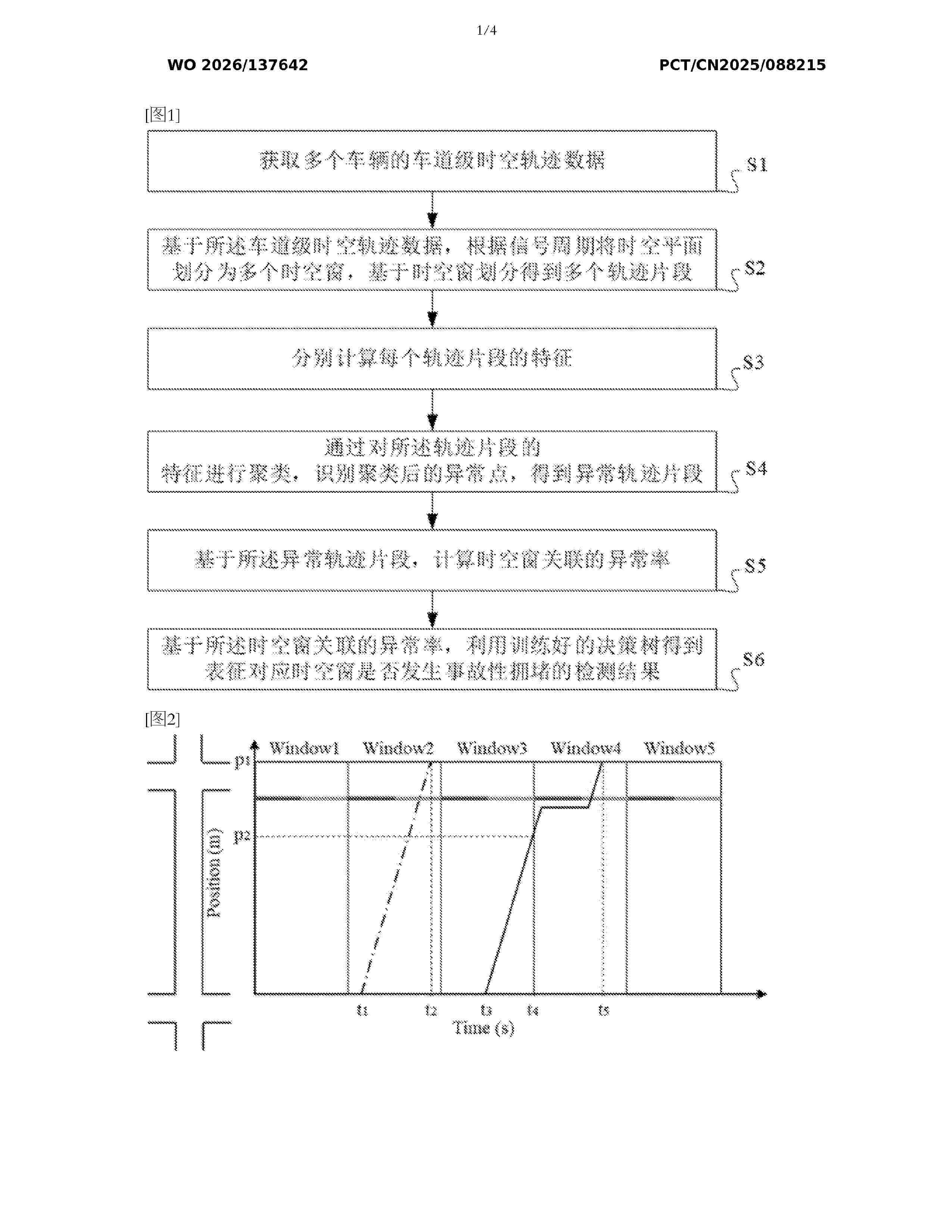
Resumen de: WO2026137642A1
The present invention relates to a method for performing two-phase detection on abnormal congestion on an urban road on the basis of the polar coordinate transformation of trajectory data. The method includes two phases, i.e., the identification of an abnormal trajectory segment and the detection of incident-induced congestion. In the phase involving the identification of an abnormal trajectory segment, two key features (i.e., an average speed and a time when a road section is entered) are defined so as to capture trajectory segment features within spatio-temporal windows, and the features are affected by both incident-induced congestion and signal timing at downstream intersections; and on the basis of the two key features, the abnormal trajectory segment is identified by means of clustering. In the phase involving the detection of incident-induced congestion, anomaly rates of the spatio-temporal windows are defined; and on the basis of the anomaly rates, a decision tree is used to identify spatio-temporal windows in which incident-induced congestion occurs. Compared with the prior art, the present invention is applicable to urban road networks, and by means of the present invention, the detection of incident-induced congestion at a signal-cycle level in time and a vehicle-flow-level in space is realized.
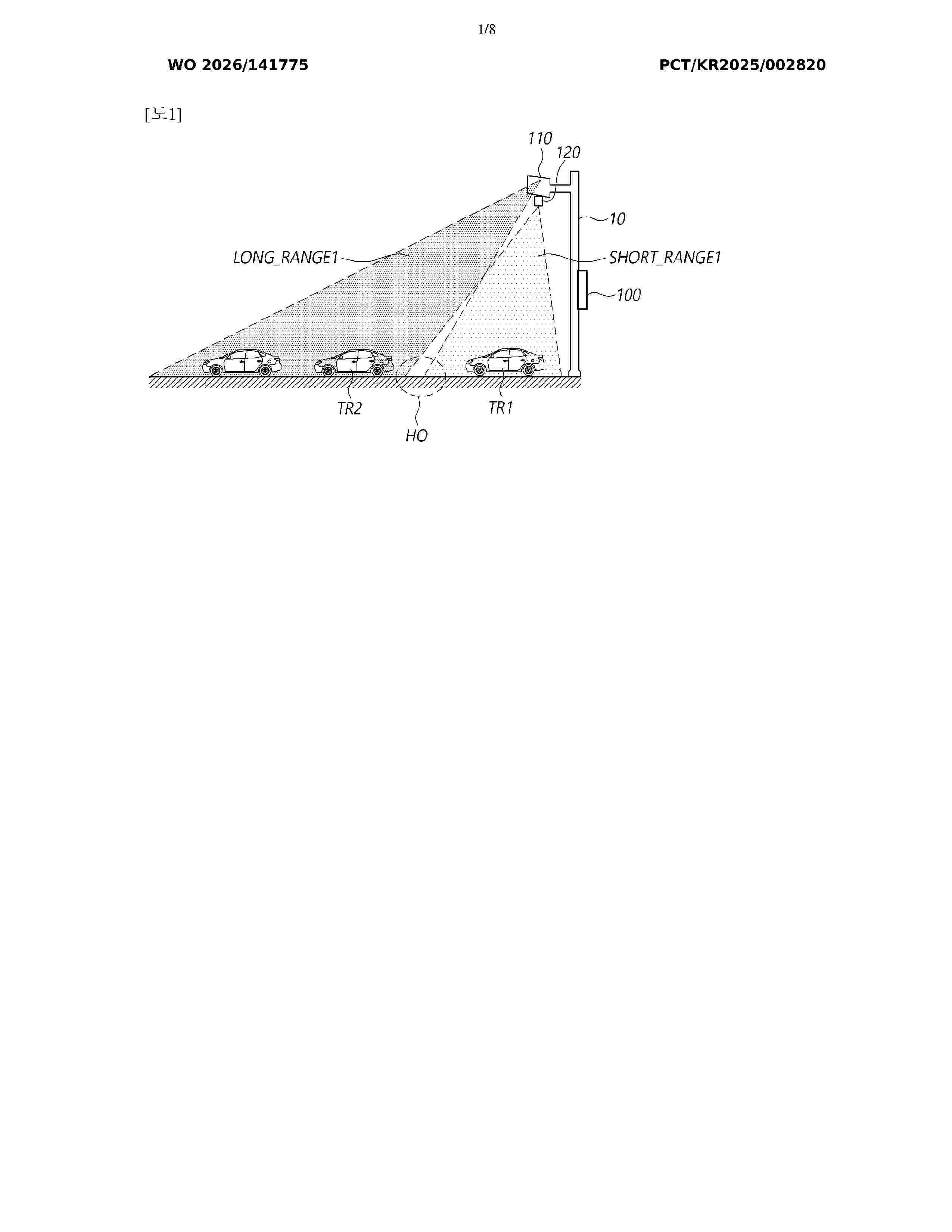
Resumen de: WO2026141775A1
An around-view radar-based traffic information collection system according to embodiments of the present disclosure may comprise: a first radar device for outputting first object detection information for a first object; a second radar device for outputting second object detection information for a second object; and a traffic information collection device for acquiring traffic information by receiving the first object detection information and the second object detection information from the first radar device and the second radar device.
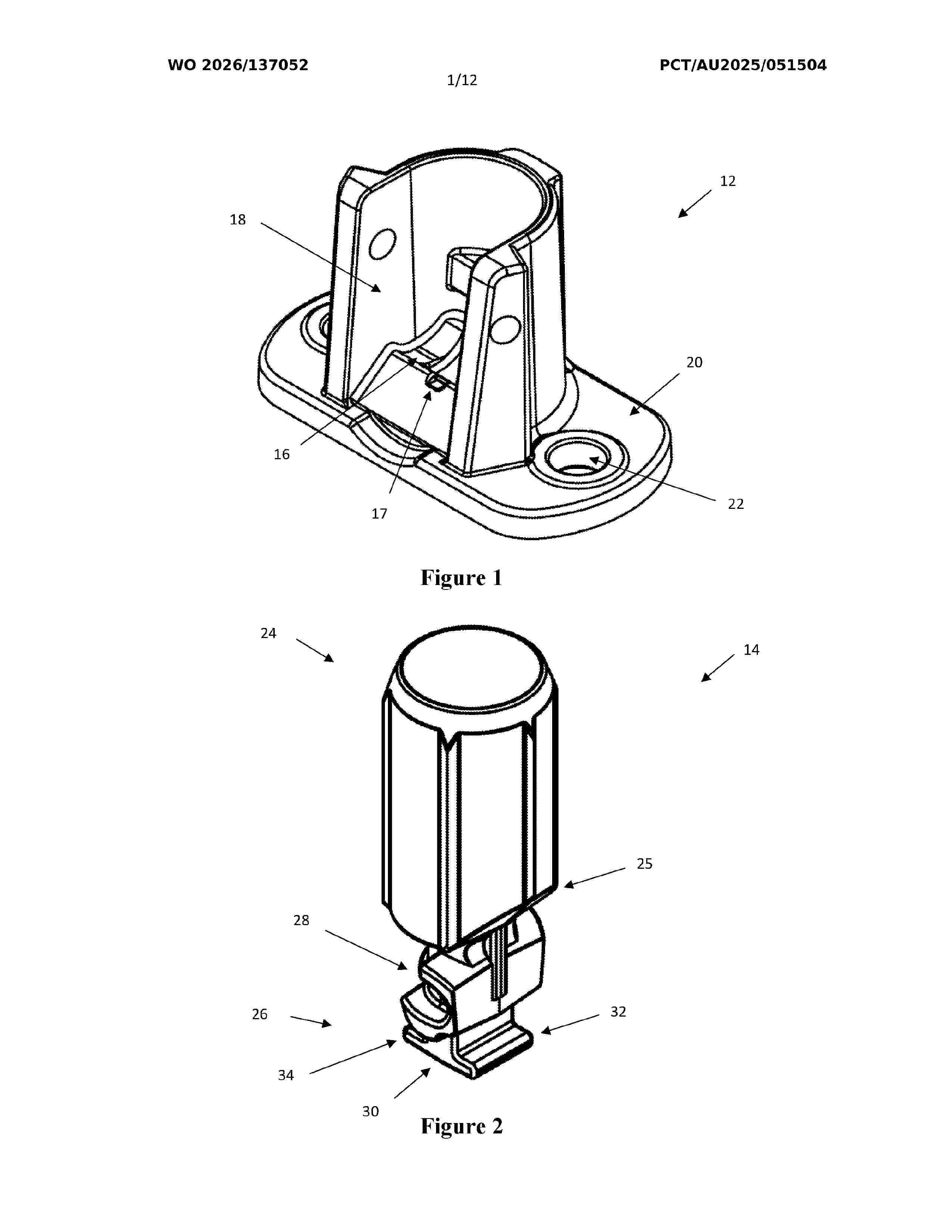
Resumen de: WO2026137052A1
Disclosed herein is a mount for a barrier system. The mount comprises a base for mounting to a surface and an end cap for a stanchion. The base is configured to engage the end cap whereby the end cap is pivotable relative to the base between orientations that correspond to vertical (about 0°) and horizontal (about 90°) positions of a stanchion in use, the base comprising a first part of an interlocking assembly. A distal portion of the end cap is configured to receive a stanchion thereat and a proximal portion of the end cap comprises a second part of the interlocking assembly. The first and second parts of the interlocking assembly are configured to become interlocked only when the base and the end cap are in a joining orientation and, once interlocked, remain interlocked at orientations of the base and the end cap other than the joining orientation.
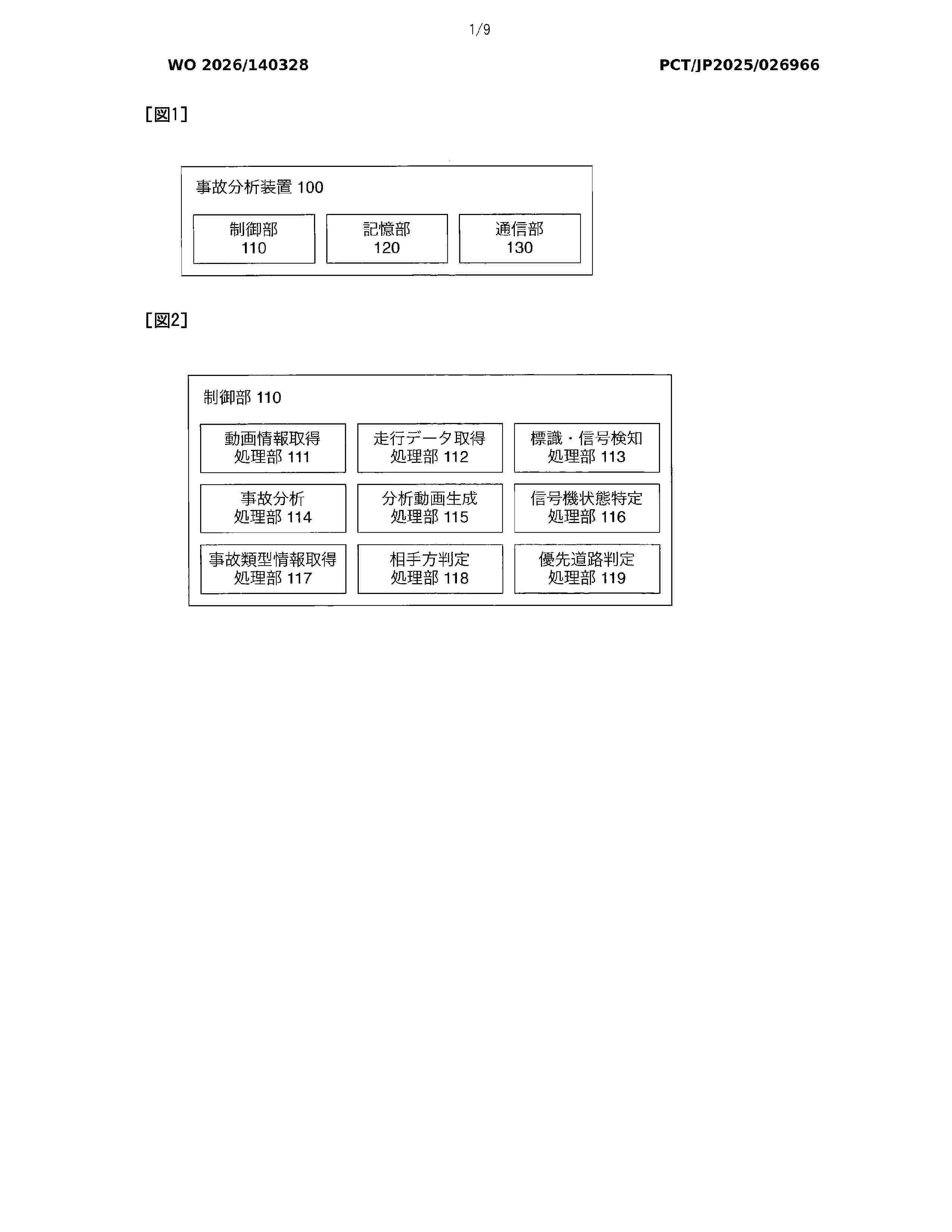
Resumen de: WO2026140328A1
The present invention obtains an appropriate analysis result. The present invention: acquires a moving image captured from a moving body in a prescribed period including the occurrence timepoint of an accident that has occurred in the moving body; acquires travel data of the moving body in the prescribed period; by using a dedicated object detection model for detecting the state of a traffic light and a traffic sign and on the basis of the moving image, detects the positions of the traffic sign and the traffic light in each frame of an analysis moving image; by using a zero shot object detection model, detects the positions of the traffic sign and the traffic light in each of the frames of the analysis moving image; and analyzes the accident on the basis of the analysis moving image, the travel data, and the state of the traffic light and the traffic sign detected in each of the frames of the analysis moving image.
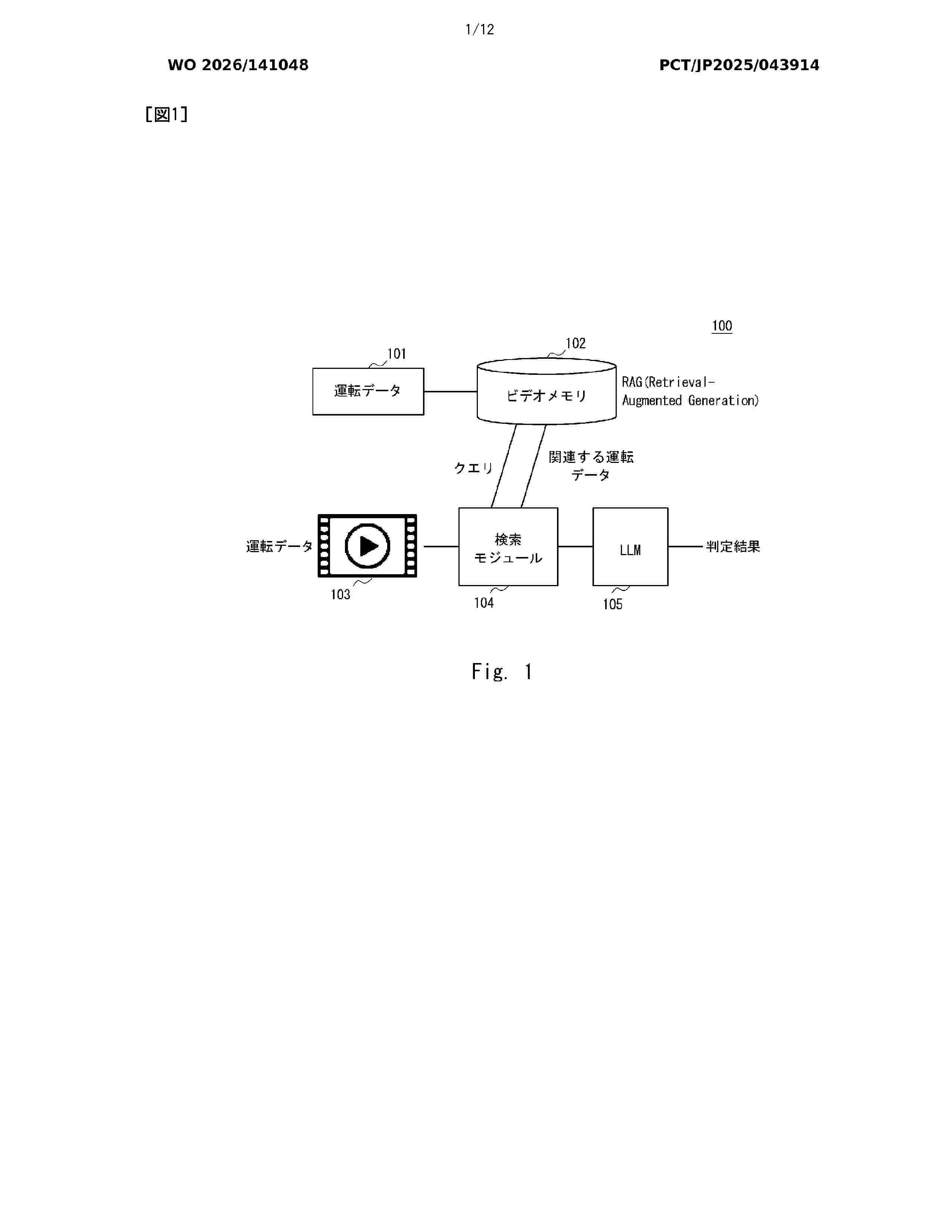
Resumen de: WO2026141048A1
Provided is an information processing system comprising: a storage means that stores, in a database, a first feature amount which is information relating to a vehicle driving simulation, the first feature amount being linked to a first text generated on the basis of simulation data; an actual data acquisition means that acquires a second feature amount which is information relating to actual driving of the vehicle; an identification means that identifies, from the database, the first feature amount in the simulation data relating to actual data, on the basis of the second feature amount; and an analysis means that analyzes the actual data on the basis of the first text linked to the identified first feature amount.
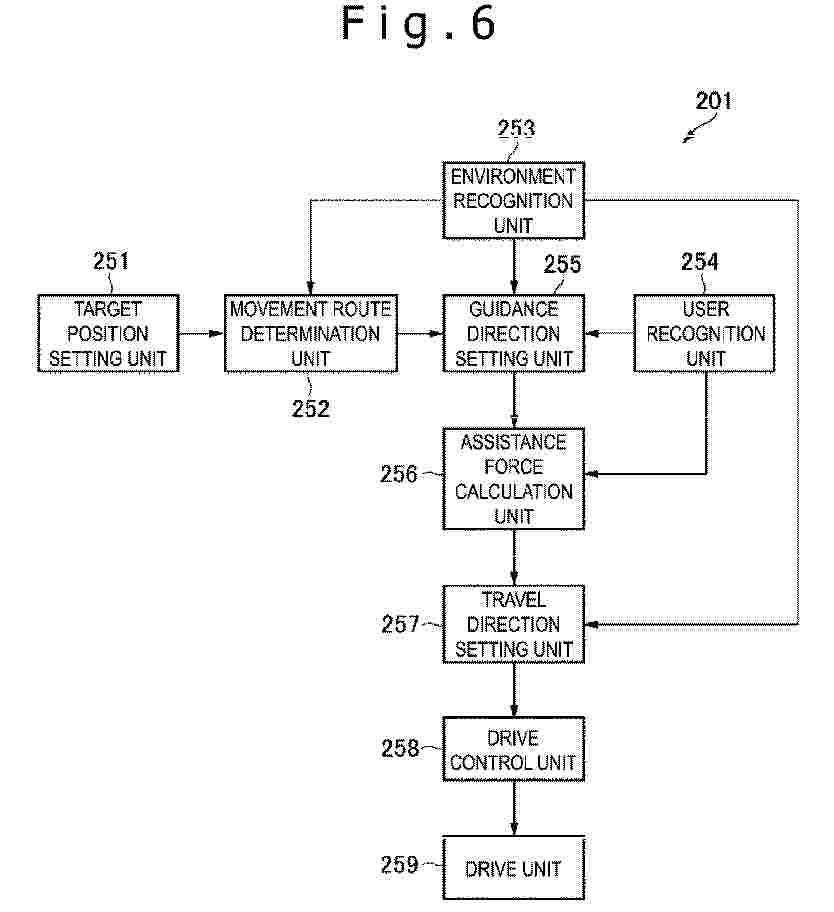
Resumen de: EP4768864A1
0001 The present technology relates to a movement assistance device and a movement assistance method that can safely guide a user. The movement assistance device includes a movement route determination unit configured to select, from at least one or more travel patterns, one travel pattern of guiding a user to a target position, and a drive control unit configured to control a drive unit such that an assistance force is applied to the user, the assistance force being a resultant force of a virtual force and a guidance force, the virtual force being a force of stabilizing a posture of the user, the guidance force being a force of guiding the user and corresponding to the selected travel pattern. The present technology can be applied to a movement assistance system using a drone.
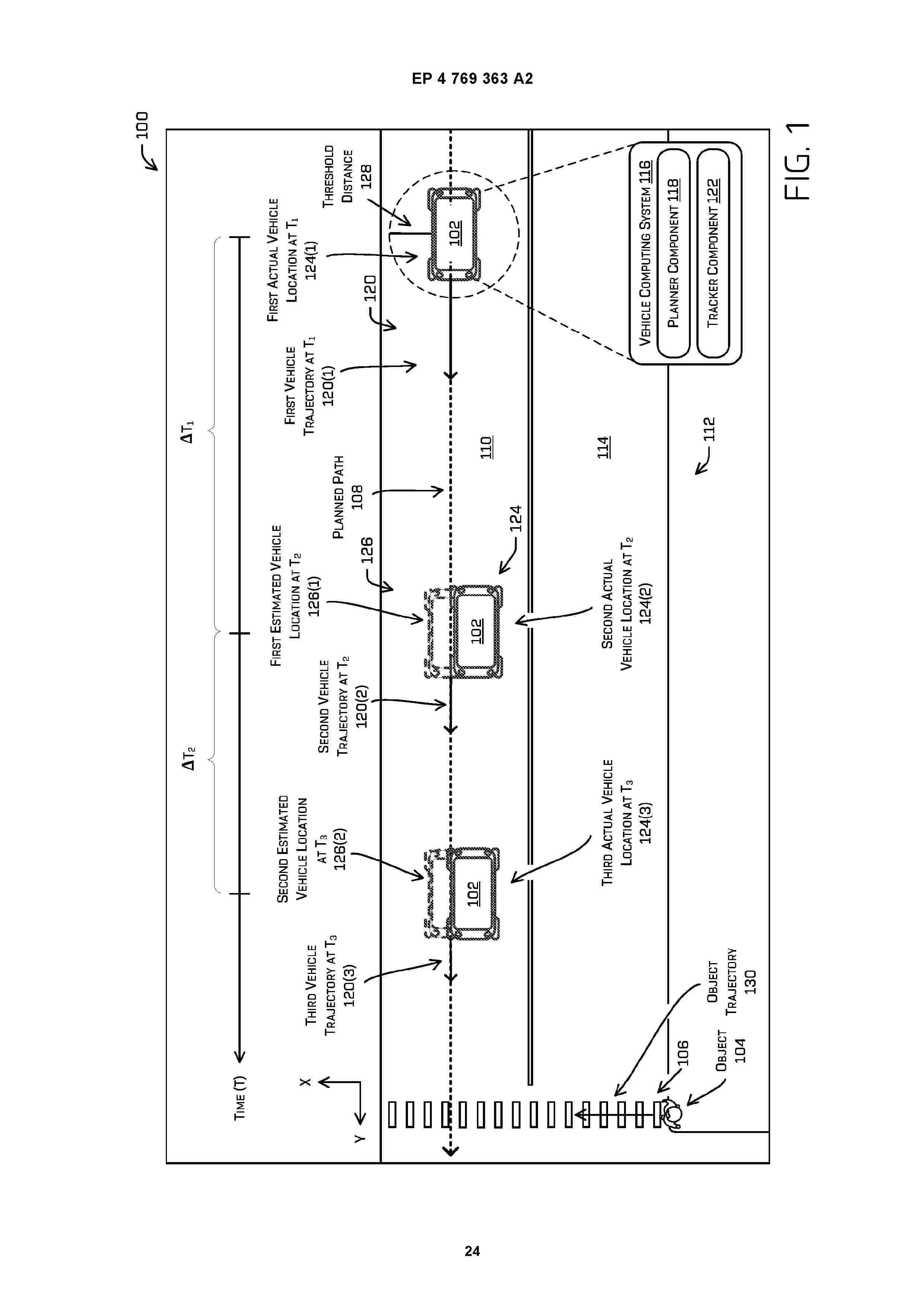
Resumen de: EP4769363A2
Techniques for determining vehicle trajectories to operate a vehicle according to a planned path are described herein. In an example, a vehicle computing system may determine a location of the vehicle at a first time. Based on the location, the vehicle computing system may determine an estimated location of the vehicle at a second time, the estimated location of the vehicle including a lateral coordinate and a longitudinal coordinate. The vehicle computing system may determine the longitudinal coordinate based on a vehicle trajectory associated with the first time (e.g., previously determined trajectory) and the lateral coordinate based on the planned path. The vehicle computing system may determine a second vehicle trajectory based in part on the estimated location and the first trajectory, and may control the vehicle according to the second vehicle trajectory.
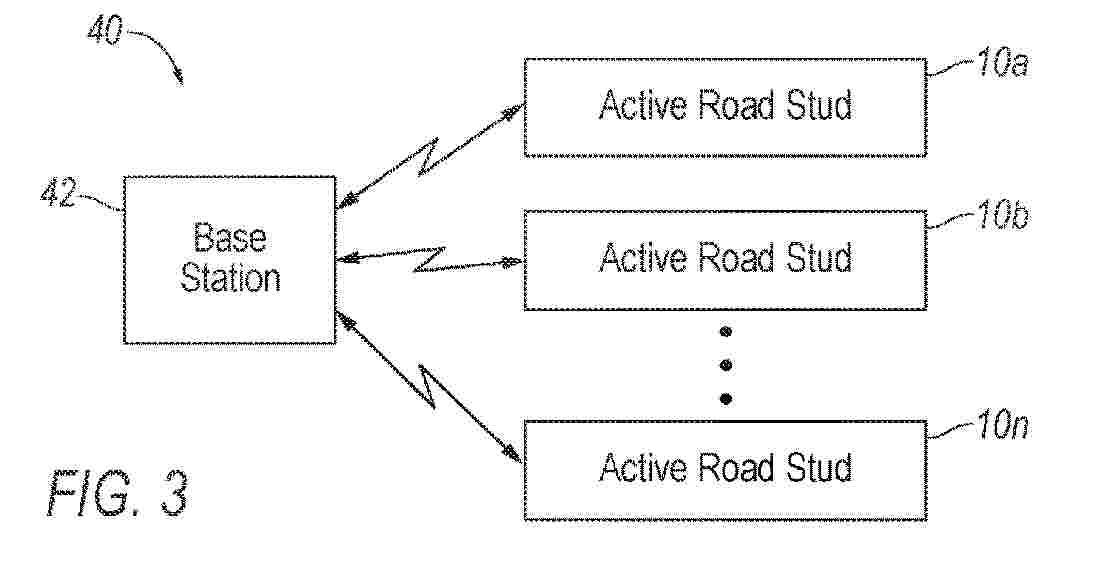
Resumen de: WO2025040936A1
Active road studs along a roadway are controlled to make synchronized operation changes. The active road studs making synchronized operation changes include the active road studs making the same operation change in synchronization with one another, such as at the same time (e.g., simultaneously) or in a sequential order (i.e., sequentially). In operation, a base station transmits a command to the active road studs, the command including information indicative of the operation change to make and when the active road studs are to make the operation change. The sequential order may be based on geographic locations of the active road studs along the roadway. The operation change that each active road stud may make includes turning on a light-emitting diode (LED) of the active road stud, turning off the LED of the active road stud, and changing the color of light emitted by the active road stud.
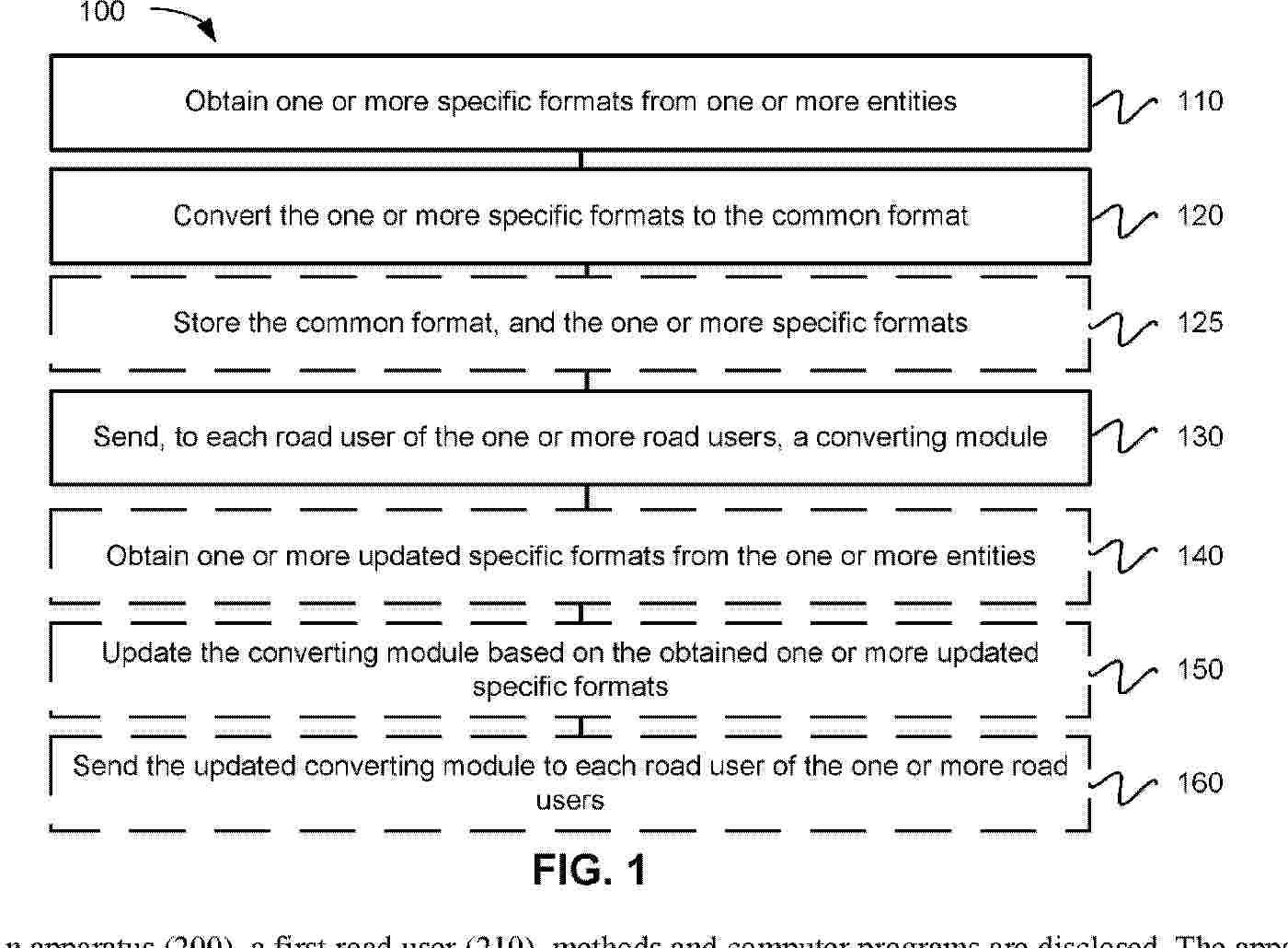
Resumen de: WO2025042315A1
An apparatus (200), a first road user (210), methods and computer programs are disclosed. The apparatus (200) is for direct distribution, between one or more road users (210, 211), of one or more urgent critical-based event notification messages (220). The apparatus (200) comprises a common format (320). The apparatus (200) is configured to obtain one or more specific formats (310, 311) from one or more entities (410, 411); converting the one or more specific formats (310, 311) to the common format (320); send, to each of the one or more road users (210, 211), a converting module (240, 241).
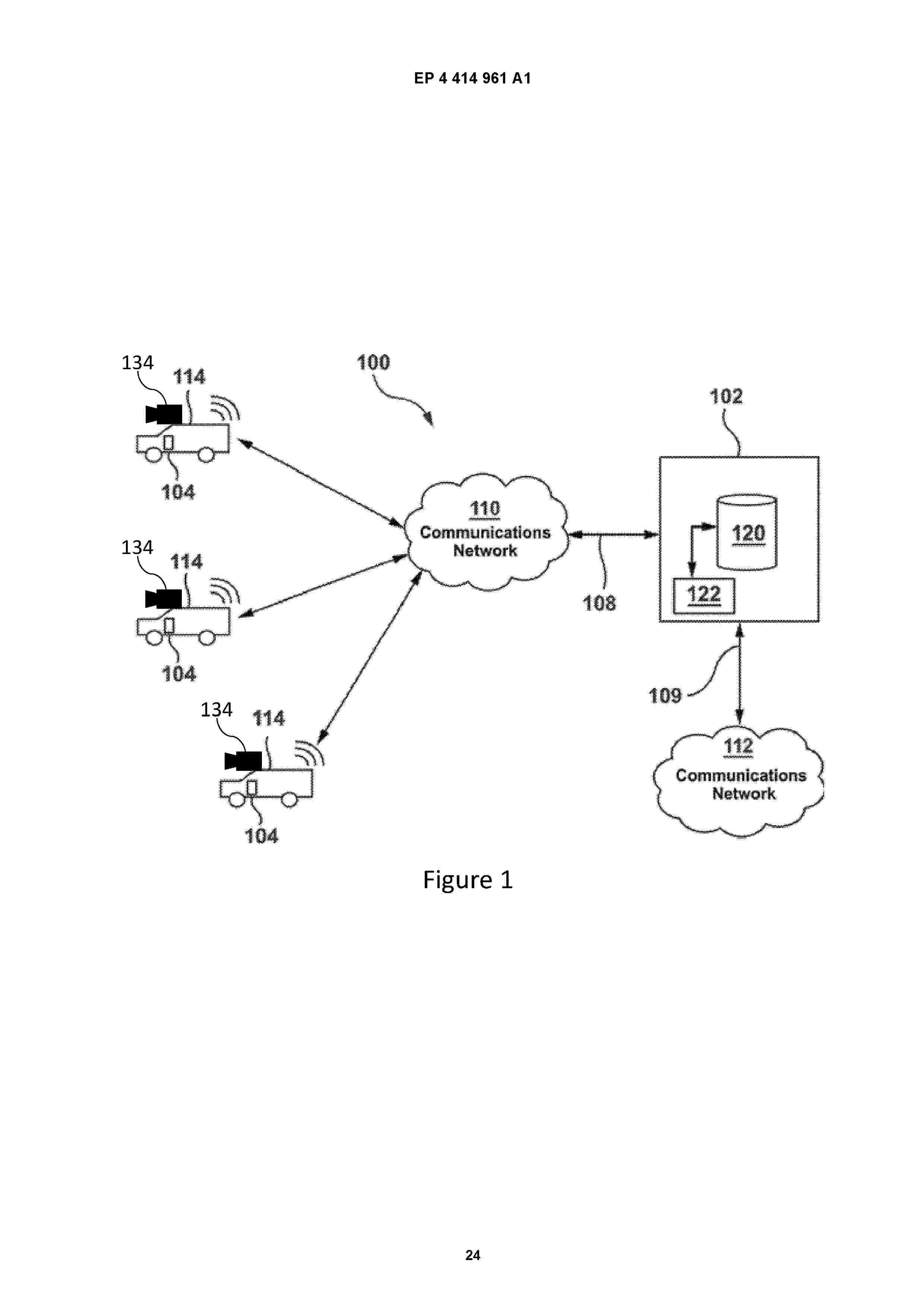
Resumen de: EP4414961A1
0001 A synchronized data set is generated from multiple asynchronous data sets. An interpolated data set is generated for each asynchronous data set, at a higher data rate than recorded data rates for the asynchronous data sets. The interpolated data for each data set is then sampled at a lower data rate which is common to all the interpolated data sets. The sampled data points are synchronized between the different data sets, such that the sampled data points represent a synchronized data set. Input telematic data can be reduced to inflection points in the telematic data, and interpolation and sampling of asynchronous data sets can be limited to threshold time periods around the inflection points.
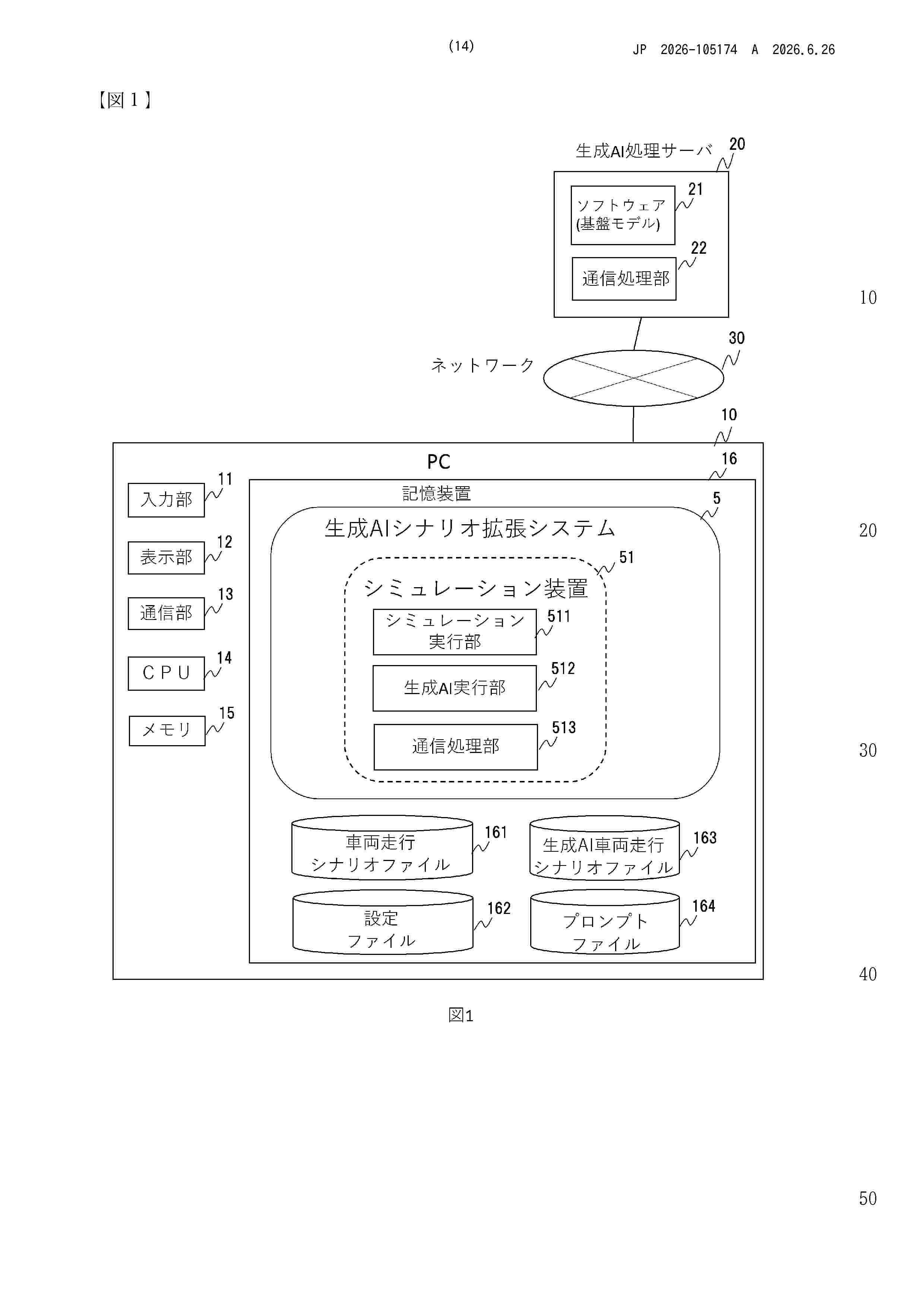
Resumen de: WO2026133596A1
The present invention makes it possible to create desired scenario data in a simulation of autonomous driving, for example, with reduced labor. This scenario data generation system includes a storage device and a processor. The storage device stores scenario data that includes information about operations of one or more objects at each sample time in a scene in which the one or more objects operate, and prompt data that instructs a generative artificial intelligence to perform a desired operation of each object. The processor starts a step-by-step simulation at each sample time based on the scenario data, causes, in each step, the generative artificial intelligence to generate a next state that is a state of the object at the next sample time due to the desired operation based on the state of the object in the scenario data, updates the state of the object at the next sample time in the scenario data to the next state, and outputs the scenario data when the simulation is completed.
Resumen de: WO2026132886A1
The invention of smart asphalt with predictive, diagnostic, and anti-icing capabilities for improving safety and reducing accidents at urban intersections and intercity roads includes a network of sensors that collect data related to environmental conditions and road surface features. This data is then processed using AI algorithms to predict and detect the formation of black ice on the asphalt surface. Upon detecting or predicting the occurrence of black ice, a heating system embedded within the asphalt layers generates appropriate heat to prevent ice formation. Depending on the type and characteristics of each data, different AI algorithms are employed, and the accuracy of prediction and detection is improved using data fusion techniques. The system generates a real-time map of the location and extent of identified and predicted ice formation, enhancing the safety and maintenance of the road network.
Resumen de: WO2026133469A1
The present invention makes it possible to improve the operation rate of a charging facility managed by a business operator operating a mobile body. This information processing device includes: a first acquisition unit that acquires travel information including position information about a mobile body on which a chargeable battery is mounted; a second acquisition unit that acquires charging facility information including position information about a charging facility used for charging the battery, the operation state of the charging facility, and manager information pertaining to a manager of the charging facility; a generation unit that generates available charging facility information, including candidates for the charging facility used for charging the battery of the mobile body, on the basis of the travel information and the charging facility information; and a notification unit that notifies the mobile body of the available charging facility information. When a charging facility managed by a first business operator operating a first mobile body is available, the notification unit notifies a second mobile body, operated by a business operator different from the first business operator, that the charging facility managed by the first business operator can be used for charging a battery of the second mobile body.
Nº publicación: WO2026132692A1 25/06/2026
Solicitante:
FCA US LLC [US]
STELLANTIS AUTO SAS [FR]
STELLANTIS AUTO SAS
FCA US LLC
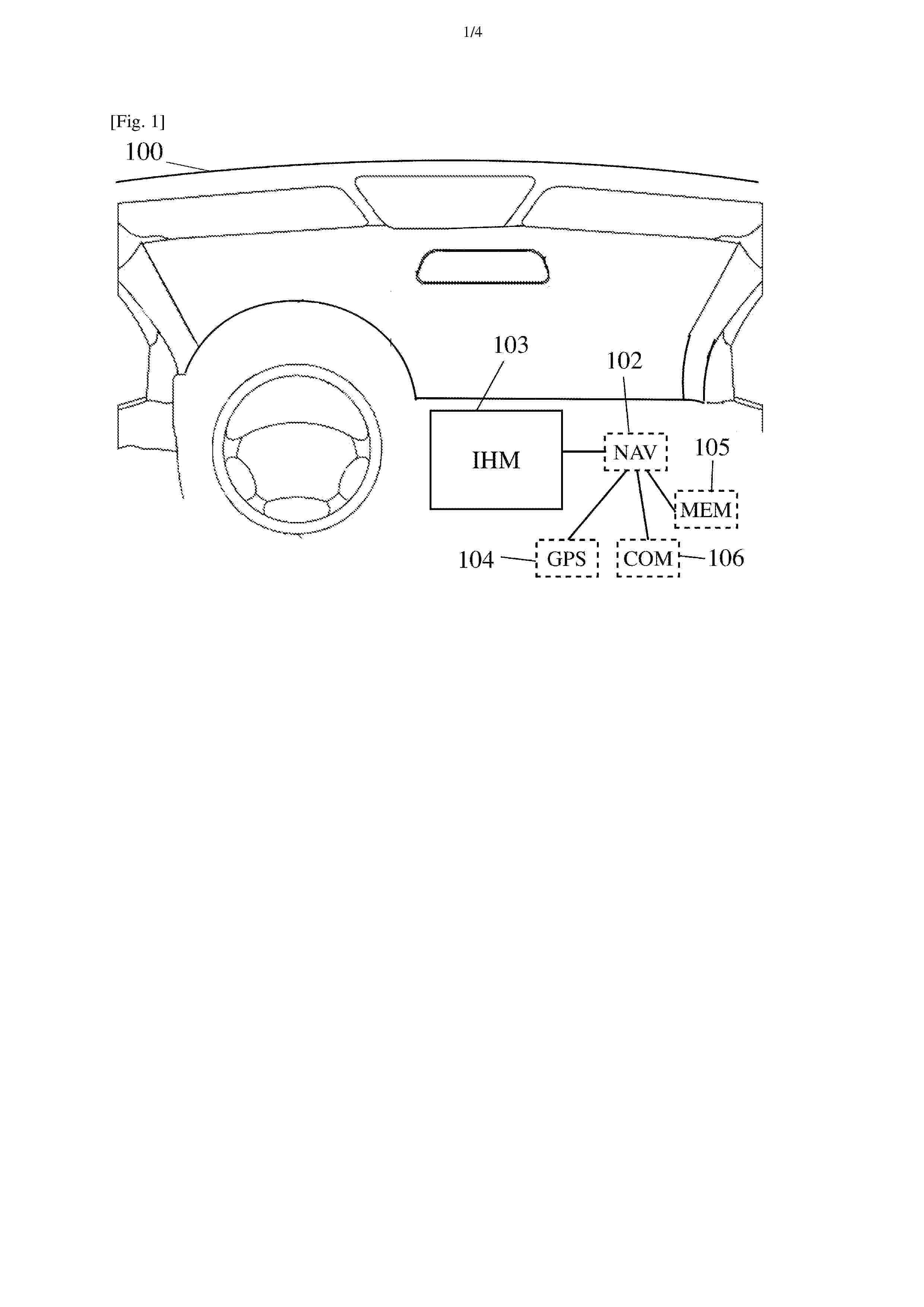
Resumen de: WO2026132692A1
The invention relates to a method for controlling a warning function that can provide a warning when a vehicle is being guided towards a limited traffic zone. The method comprises determining (200) the coordinates of a usual address of a vehicle user. If the usual address is inside a first limited traffic zone from a set containing at least one limited traffic zone, a perimeter is defined (202) around the usual address. When the user indicates (211) a destination in a navigation function of the vehicle, the warning function is disabled (215) if the destination is inside the first limited traffic zone and the defined perimeter.
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica