Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 33
resultados
33
resultados
 Última actualización
14/07/2026 [07:52:00]
Última actualización
14/07/2026 [07:52:00]


 Resultados 25 a 33 de 33
Resultados 25 a 33 de 33
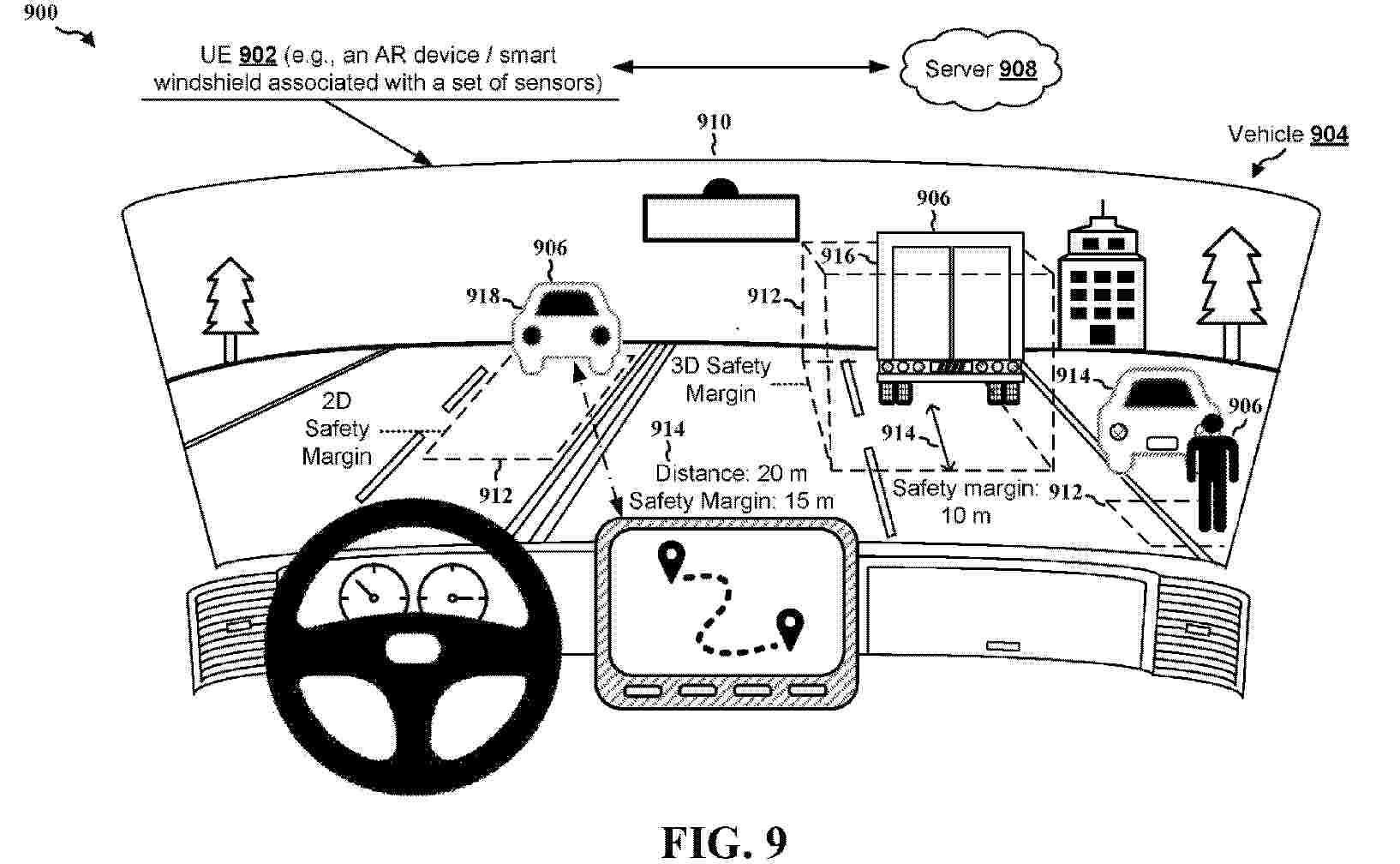
Resumen de: WO2025038186A1
Aspects presented herein may enable a UE (e.g., a vehicle, an autonomous vehicle, an on-board unit (OBU) of a vehicle, an advanced driver assistance systems (ADAS) of a vehicle) to calculate and output safety margins for objects around the UE or a vehicle. In one aspect, a UE receives or transmits a request to provide safety margin visualization assistance. The UE obtains, in response to the request, an indication of a safety margin associated with an object based on a distance between the UE and the object and at least one of: a size of the object, a speed of the object, a location of the object, a type of the object, a direction of the object, or a movement pattern of the object. The UE outputs the safety margin associated with the object.

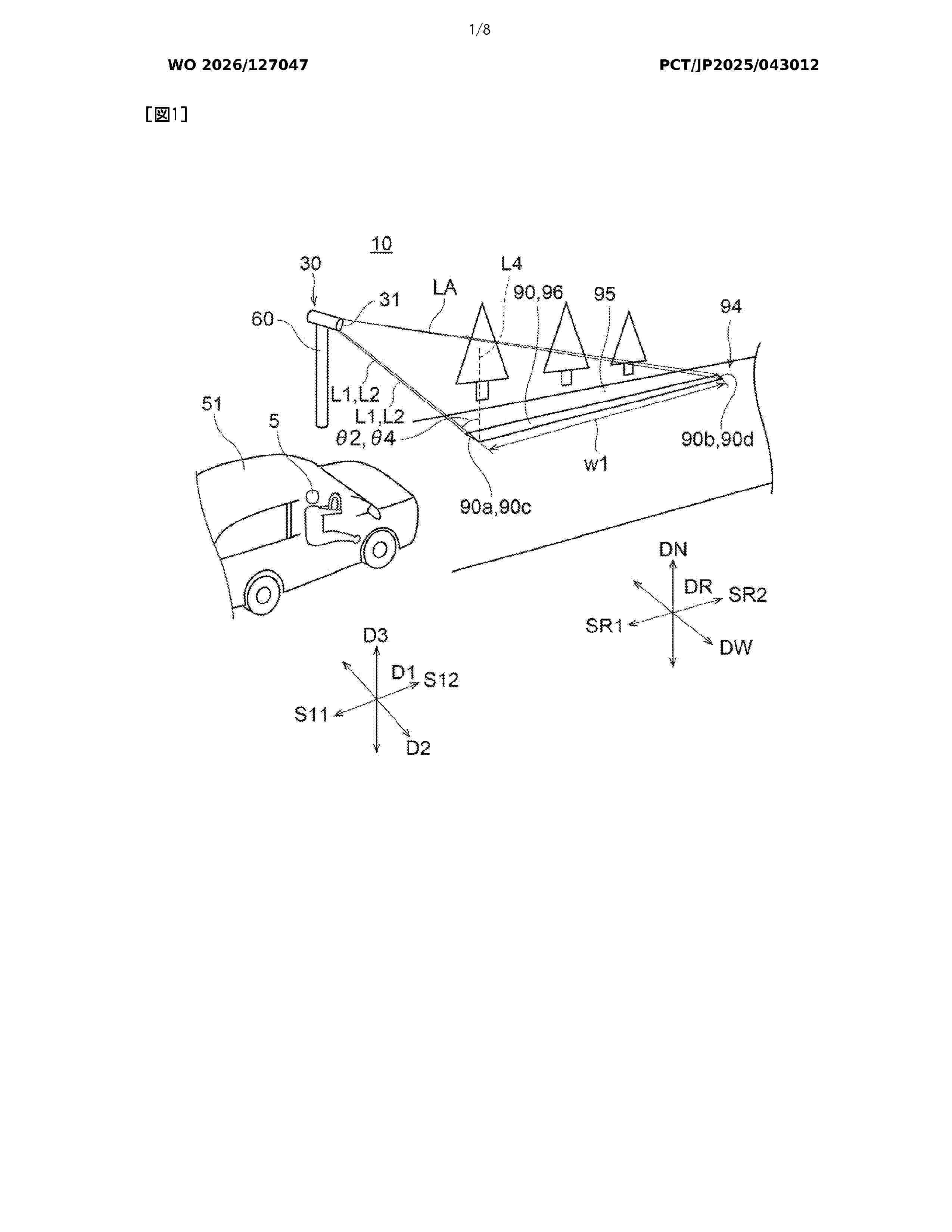
Resumen de: WO2026127047A1
A road display device 10 comprises a lighting device 30 that irradiates a road surface 95 with light so as to project a display having a width at least in a first direction. The display has a first end portion 90a located on a first side S11 in a first direction D1. In observation from a vertical direction DN, an angle Φ1 formed by a first light beam L1 and a virtual line segment L3 is smaller than 90°, the first light beam L1 being emitted from the lighting device 30 to the first end portion 90a, the virtual line segment L3 extending from the first end portion 90a to the first side S11 along the first direction D1. In observation from a second direction D2 perpendicular to the first direction D1 and perpendicular to the vertical direction DN, an angle θ1 formed by the first light beam L1 and a perpendicular line L4 to the road surface 95 is larger than 0° and is 83.15° or smaller.
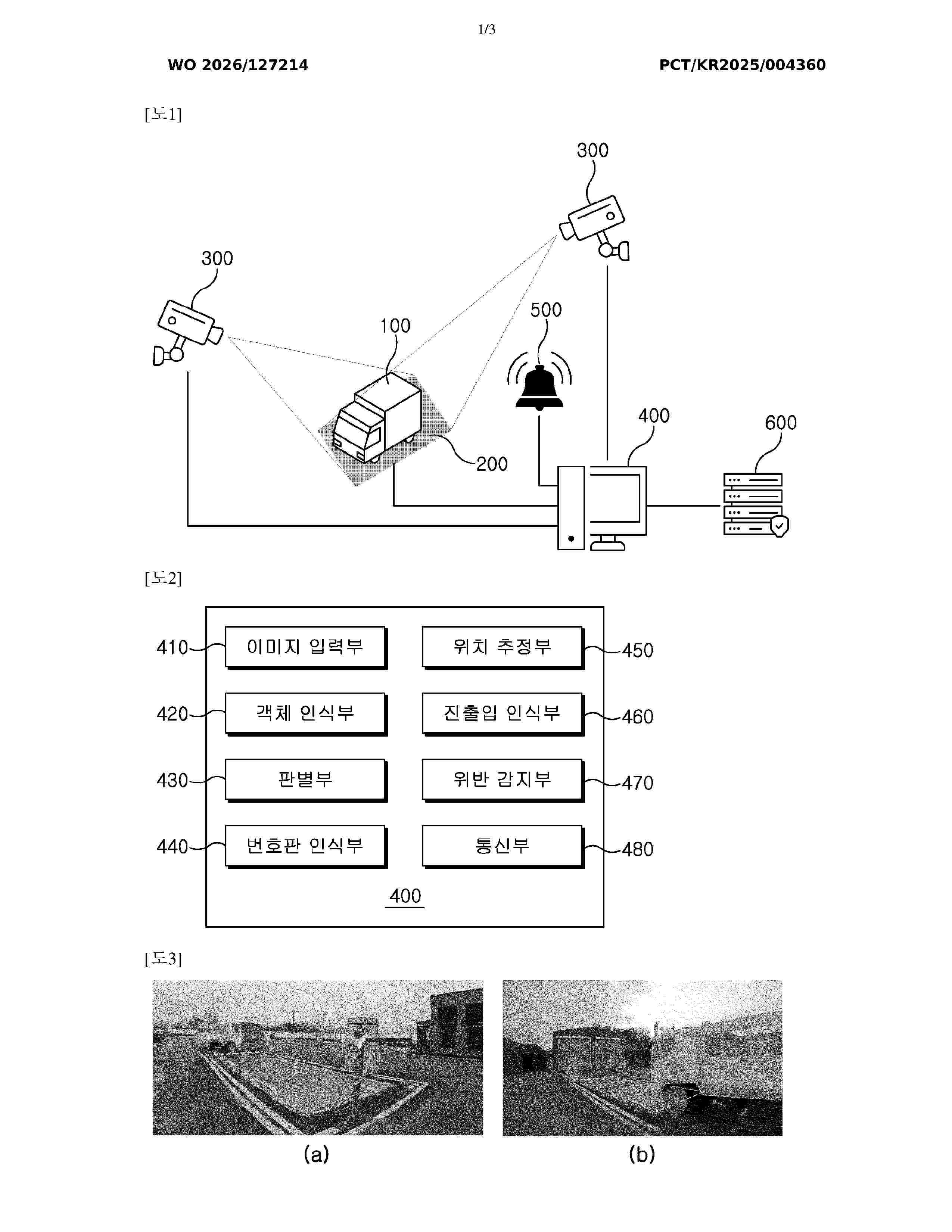
Resumen de: WO2026127214A1
The present invention relates to an apparatus for monitoring a weighing violation of a vehicle and an operating method thereof and, more specifically, the apparatus comprises: a vehicle; a weighbridge for measuring the weight of the vehicle; one or more cameras for photographing the vehicle and the weighbridge; a detection device for detecting, by using artificial intelligence, whether the weight of the vehicle is normal on the basis of an image captured by the camera; and an alarm unit for notifying a driver of the vehicle of a weighing violation, and thus, the weighing violation may be automatically detected without manpower and notified to the driver.
Resumen de: EP4760672A1
The present disclosure relates to systems and methods for identifying commercial domiciles. An example of one such method includes operating at least one processor to: receive telematics data originating from a plurality of telematics devices installed in a plurality of vehicles; identify, using the telematics data, a vehicle stop zone, each vehicle stop zone comprising a vehicle stop cluster; and identify the vehicle stop zone as a commercial domicile by applying to the vehicle stop cluster of the vehicle stop zone at least one machine learning model trained to classify vehicle stop zones based on one or more vehicle stop features thereof.
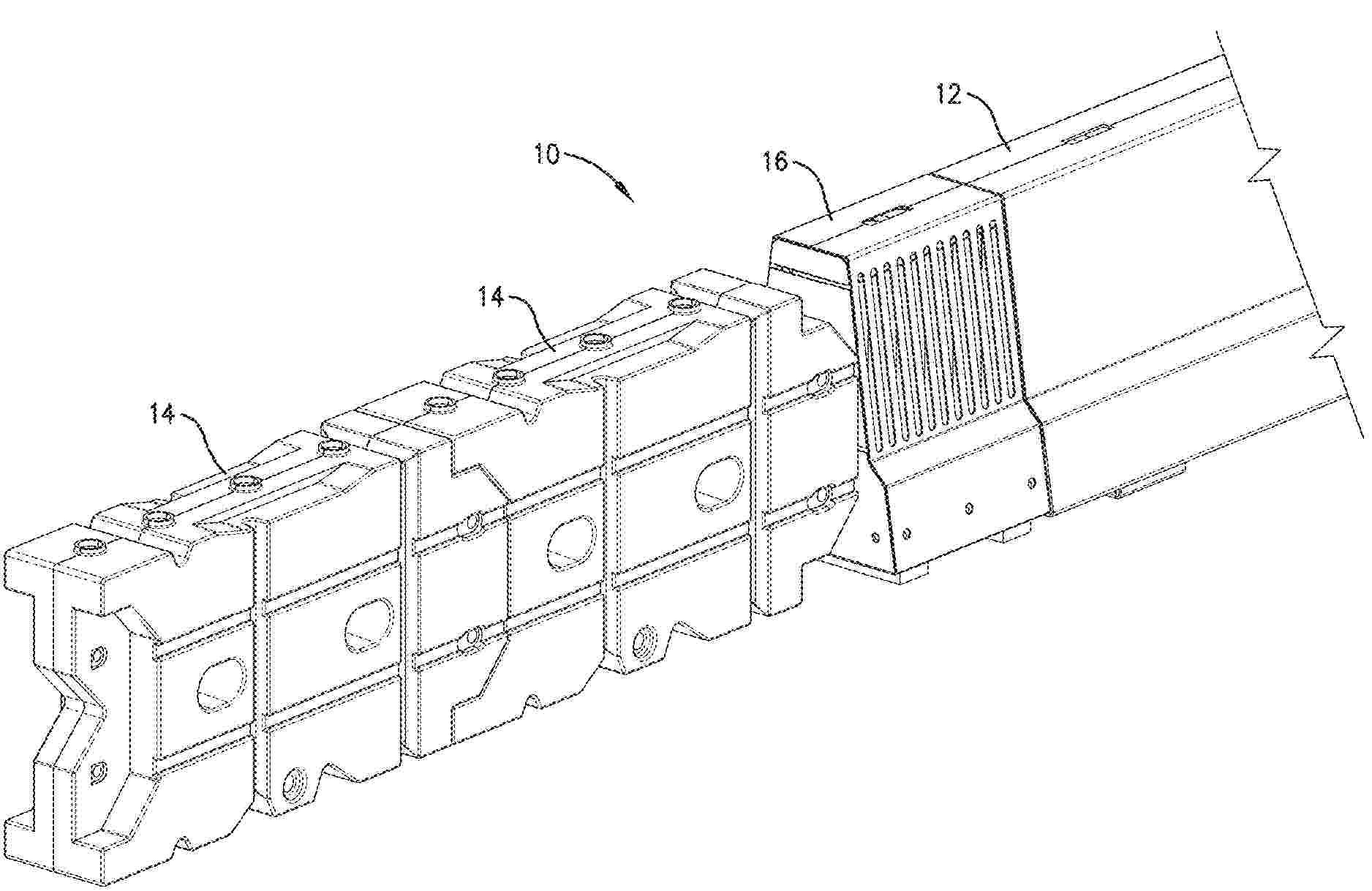
Resumen de: US2025050949A1
0000 An intermediate transition for connecting a crash cushion to a rigid structure includes a housing and an energy absorbing module. The housing defines an inner space and includes a top wall, a front wall, a rear wall, and a side wall. The front wall is operatively associated with the top wall and is operable to connect to the crash cushion. The rear wall is operatively associated with the top wall and is operable to connect to the rigid structure. The side wall is operatively associated with the top wall and includes a weakened portion. The energy absorbing module is located in the inner space of the housing.
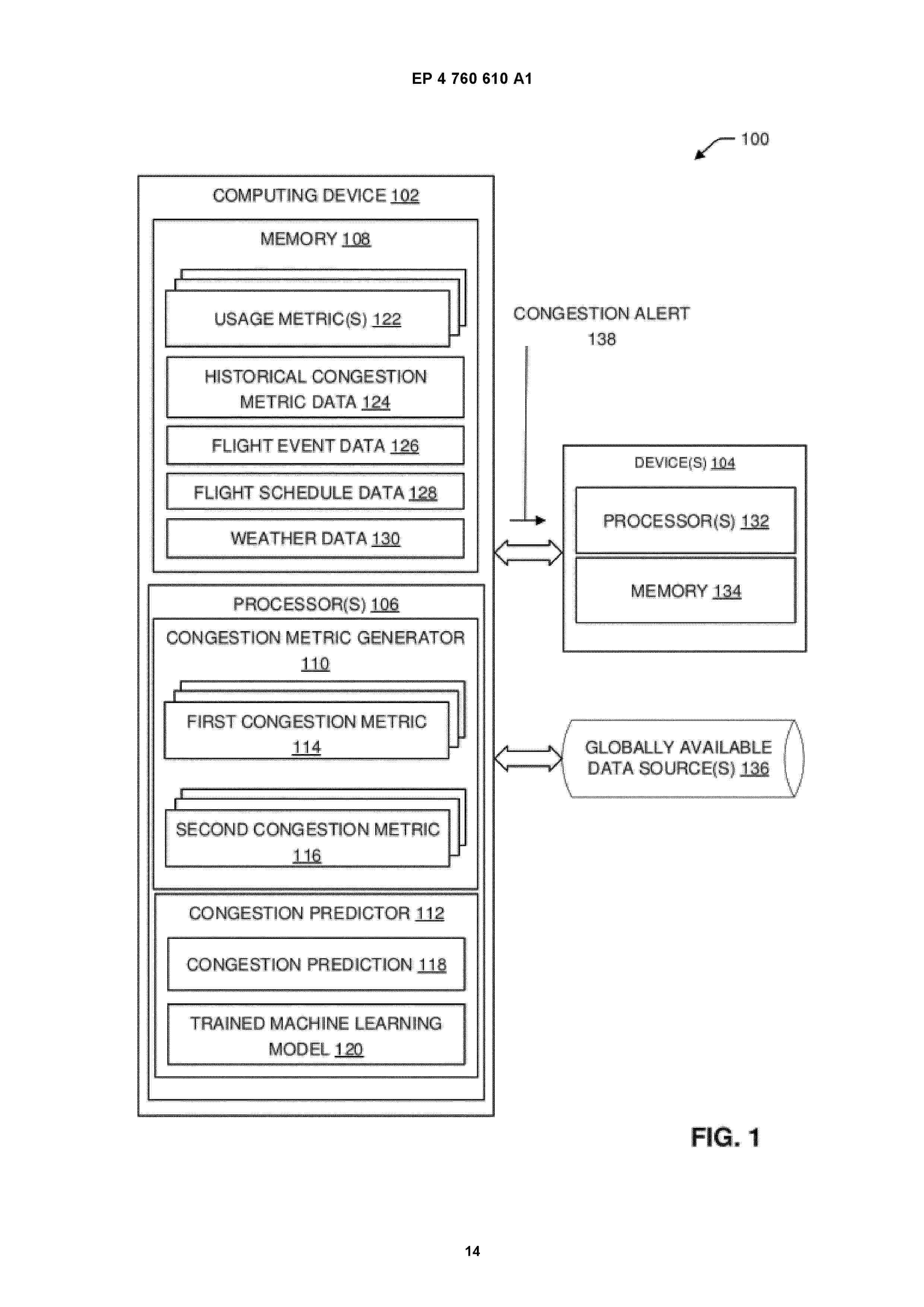
Resumen de: EP4760610A1
A device includes one or more processors configured to generate an operational congestion metric associated with a particular airport, wherein the operational congestion metric is based at least on one or more usage metrics for the particular airport. The one or more processors are configured to generate an impact congestion metric non-linearly based at least on the operational congestion metric. The one or more processors are configured to determine based on the impact congestion metric, a congestion prediction for the particular airport. The one or more processors are configured to communicate a congestion alert for the particular airport, wherein the congestion alert is based at least on the congestion prediction.
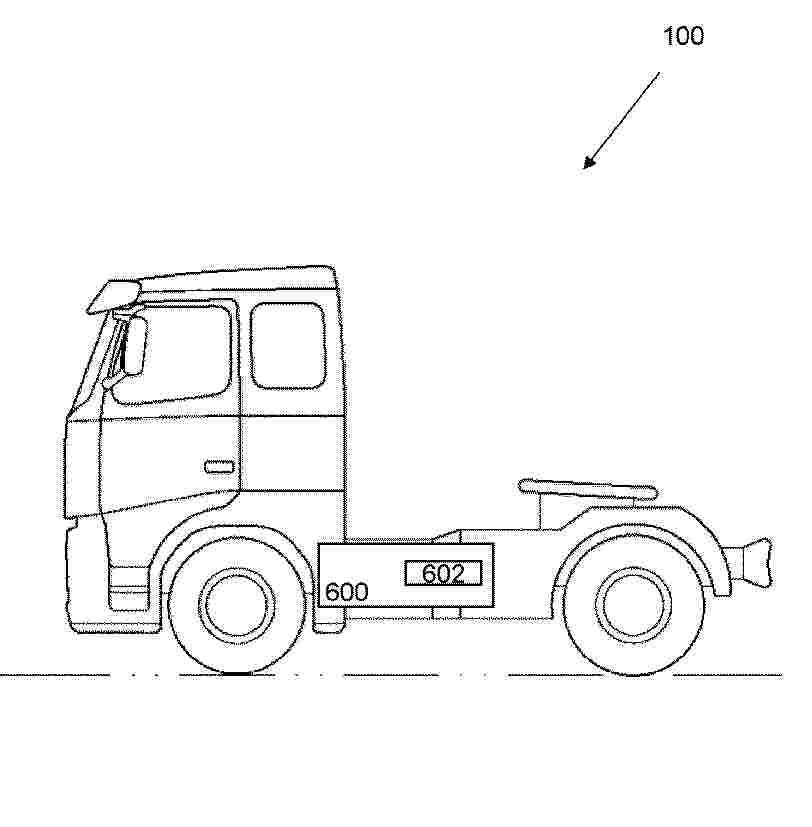
Resumen de: EP4761218A1
The disclosure relates to a computer system (600) for handling configurations for an at least partly autonomous vehicle (100), the computer system (600) comprising processing circuitry (602) configured to:- at vehicle startup, determine a current geographical zone in which the vehicle (100) is currently located;- compare the current geographical zone with a last known geographical zone to determine if the current geographical zone is part of the last known geographical zone or not;- obtain a new vehicle configuration for the current geographical zone when the current geographical zone is not part of the last known geographical zone; and to- determine whether or not to update the vehicle (100) with the new vehicle configuration for the current geographical zone.
Nº publicación: ES3070527T3 16/06/2026
Solicitante:
BETONFORM GMBH
PGH GEOSERVICE GMBH
Betonform GmbH
PGH-Geoservice GmbH
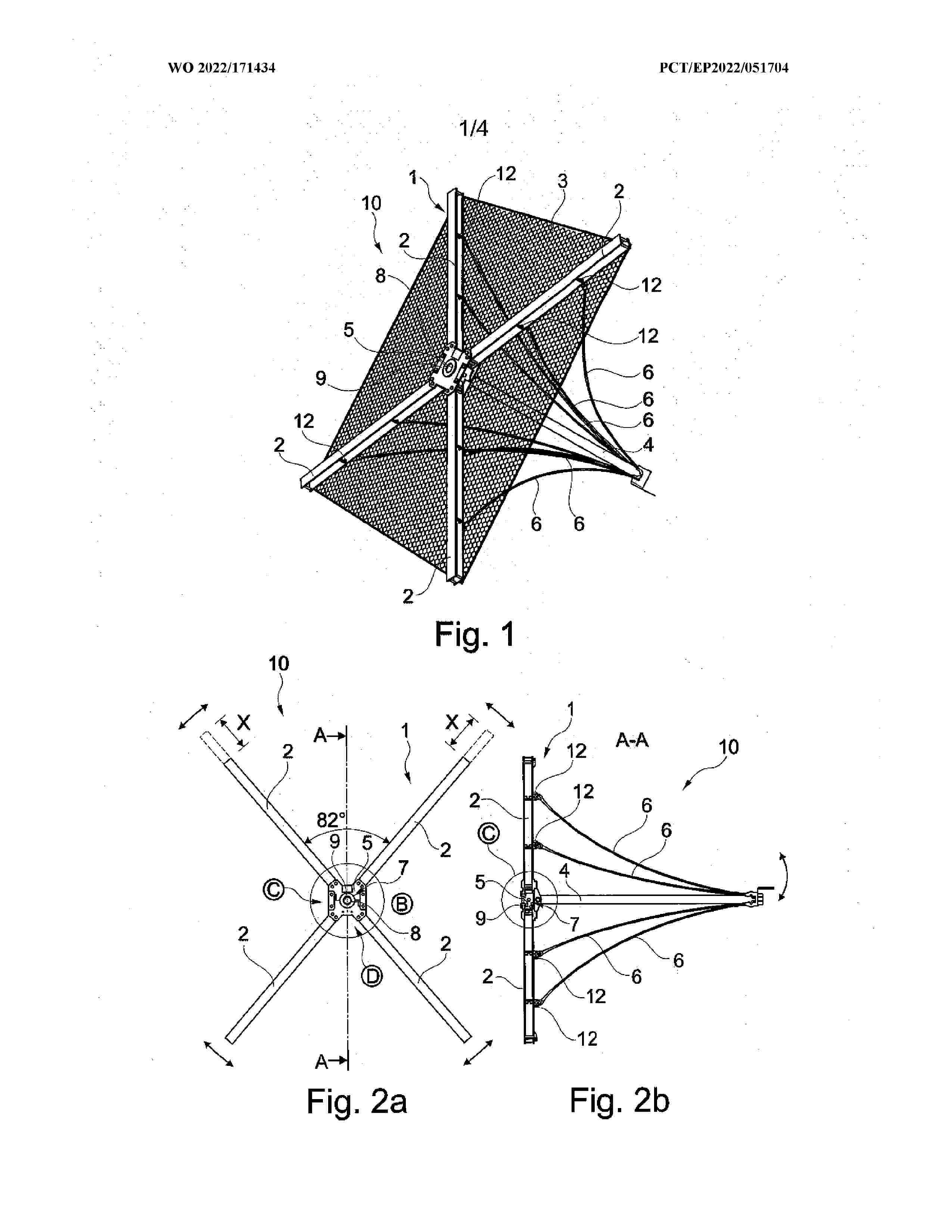
Resumen de: WO2022171434A1
An element (10) for slope securement particularly in the field of avalanche protection, ground, scree and rock retention or stream bed stabilization, having a substantially cross-shaped strut part (1) in the form of a framework which defines a plane and is composed of a plurality of coupled-together struts (2), having a planar holder (3) fastened to the strut part (1), and having an anchor rod (4) or anchor element which projects rearwardly substantially perpendicular to the holder (3) and to the strut part (1) and which is fastened to the strut part (1), wherein between a free end of the anchor rod (4) and the struts (2) are provided holding cables (6) for bracing the anchor rod (4) at a preset specific angle to the plane of the holder (3), wherein on the strut part (1) is provided a central coupling element (5) to which the struts (2) are each fastened releasably and/or adjustably with respect to one another by one of their ends, and wherein the anchor rod (4) is mounted on the coupling element (5) in particular such that it can move in all directions to adjust a mounting angle in relation to the plane of the holder (3).
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica