Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.
Los Bonos 1, 2 y 3 se encuentran actualmente cerrados. En las próximas semanas se proporcionará más información acerca de su apertura de cara a 2025.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 50
resultados
50
resultados
 Última actualización
21/11/2024 [07:03:00]
Última actualización
21/11/2024 [07:03:00]


 Resultados 25 a 50 de 50
Resultados 25 a 50 de 50
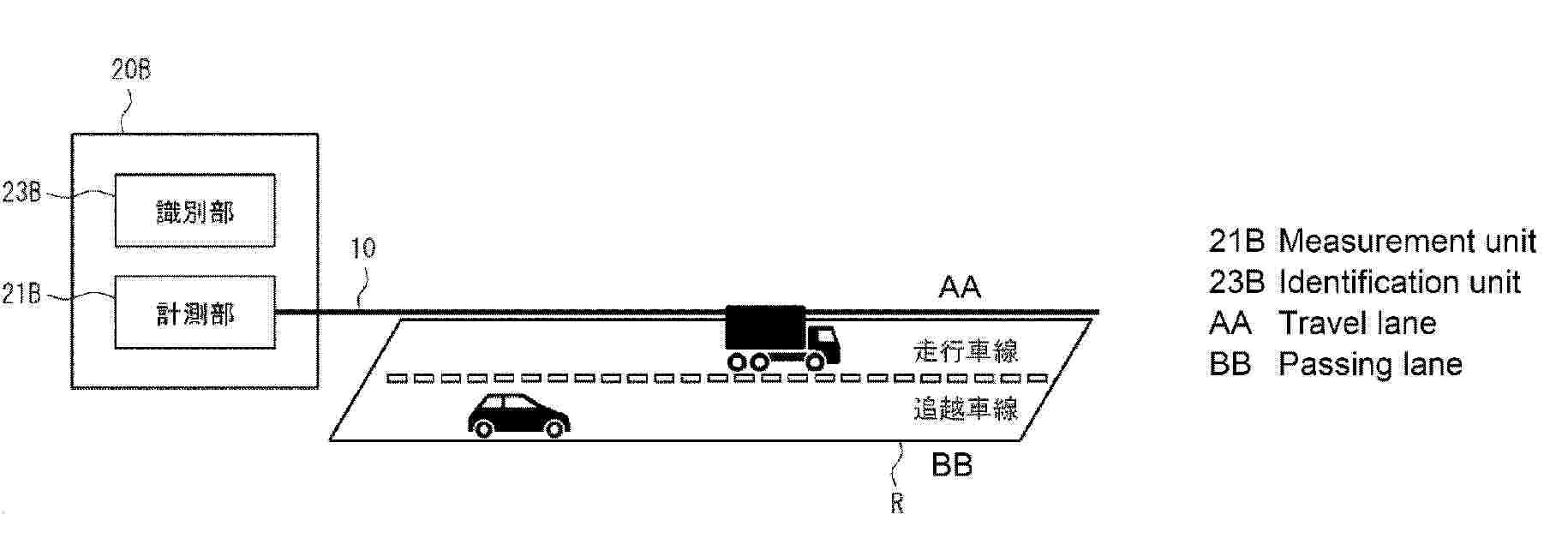
Resumen de: WO2024224569A1
A lane identification system according to the present disclosure comprises: an optical fiber (10) that is embedded in a road (R); a measurement unit (21B) that measures, on the basis of an optical signal received from the optical fiber (10), the vibration characteristics of vibrations generated on the road (R); and an identification unit (23B) that derives vibration intensity when a vehicle passed through an observation point, on the basis of vibration characteristics, which are among the vibration characteristics, when the vehicle passed through the observation point on the road (R), and identifies the lane in which the vehicle that passed through the observation point is traveling, on the basis of the derived vibration intensity and a vehicle section of the vehicle that passed through the observation point.

Resumen de: WO2024225082A1
Provided are a method and device which superimpose and display three-dimensional position information (N, E, Z) about azimuth axes (N, E) or feature points on a camera-captured image displayed on a display unit. The device comprises: the display unit that displays the image captured by the camera mounted on an information processing device; and a data processing unit that superimposes and displays an azimuth axis indicating an azimuth on a display image of the display unit. The data processing unit executes camera orientation calculation processing for calculating the camera orientation on the local coordinate system corresponding to a device such as a GPS sensor, and azimuth axis display processing for analyzing the azimuth of the display image from the calculated camera orientation and superimposing and displaying the azimuth axis on the display image of the display unit. Further, three-dimensional position information is displayed in association with the feature point on the display image.
Resumen de: WO2024225511A1
Provided is an information providing method of an electronic device. The information providing method may comprise the steps of: obtaining a store information request and information about a location of a user; identifying first location identification information corresponding to the user on the basis of the information about the location of the user; on the basis of first information about a location identification information set mapped to each of a plurality of stores, identifying one or more stores mapped to the first location identification information among the plurality of stores; and providing information about the one or more stores to the user, wherein a location identification information set corresponding to a service area configured for each of the plurality of stores is mapped to each of the plurality of stores.
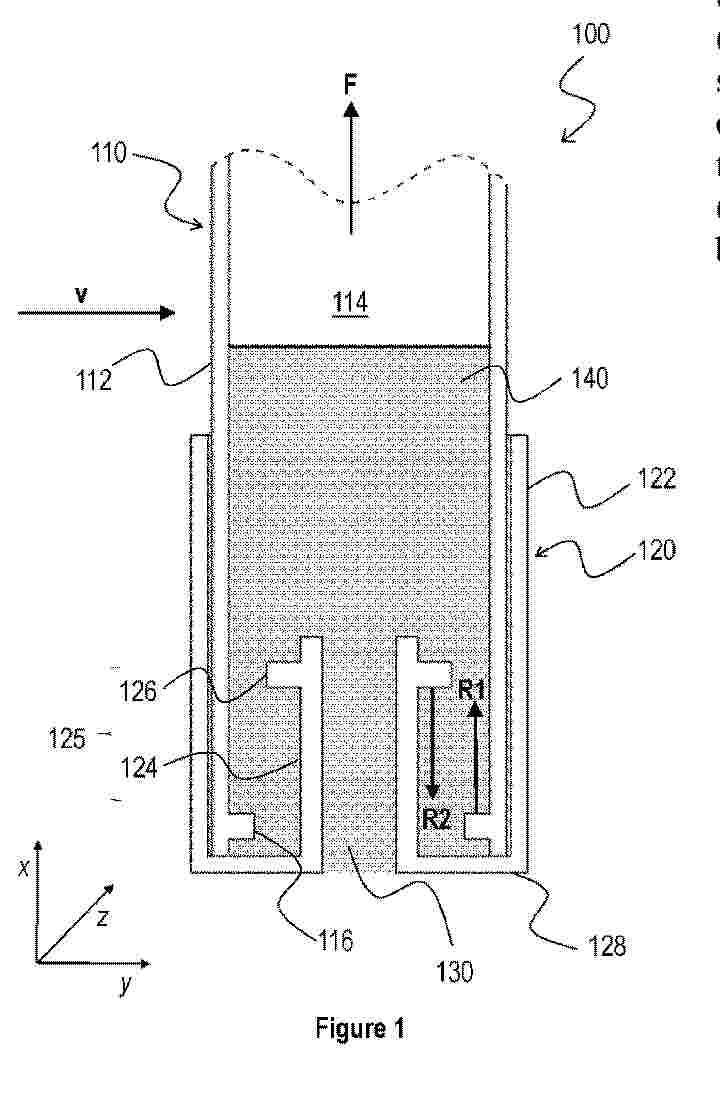
Resumen de: WO2024224048A1
A bollard (100) comprises a post (110) having a peripheral wall (112) defining an internal volume (114), a socket (120) configured to receive and support the post, and a ballast material (140) disposed within the internal volume of the post. The post and/or socket comprise a formation (116, 125) extending into the internal volume of the post, wherein the formation is configured to exert a force (R1, R2) upon the ballast material (140) when the bollard receives an impact. The bollard may be supplied as a kit of parts.
Resumen de: WO2024223103A1
Various embodiments include methods and vehicle processing systems implementing such methods for protecting vehicles from dangers caused by animals on or near the roadway. In various embodiments, a vehicle processing system may perform a recognition process to identify an animal detected in proximity to the vehicle, perform a plurality of simulations of outcomes for the vehicle and other vehicles resulting from stimulating the identified animal using multiple different stimuli modes of the vehicle signal devices in which each different stimuli mode is predicted to elicit different animal behaviors, select one of the different stimulus modes to be performed by vehicle signal devices to elicit a behavior of the identified animal based on the plurality of simulated outcomes for the vehicle and other vehicles, and control signal devices of the vehicle to perform the selected stimulus.
Resumen de: WO2024223372A1
The invention relates to a system for creating scenarios, designed to carry out a method comprising the following steps: a) receiving a textual description of a scenario, b) receiving creation instructions, c) generating a machine-readable description of the scenario by means of an algorithm, the algorithm comprising a trained machine learning model, d) outputting the machine-readable description of the scenario. The invention also relates to a corresponding method for creating scenarios.
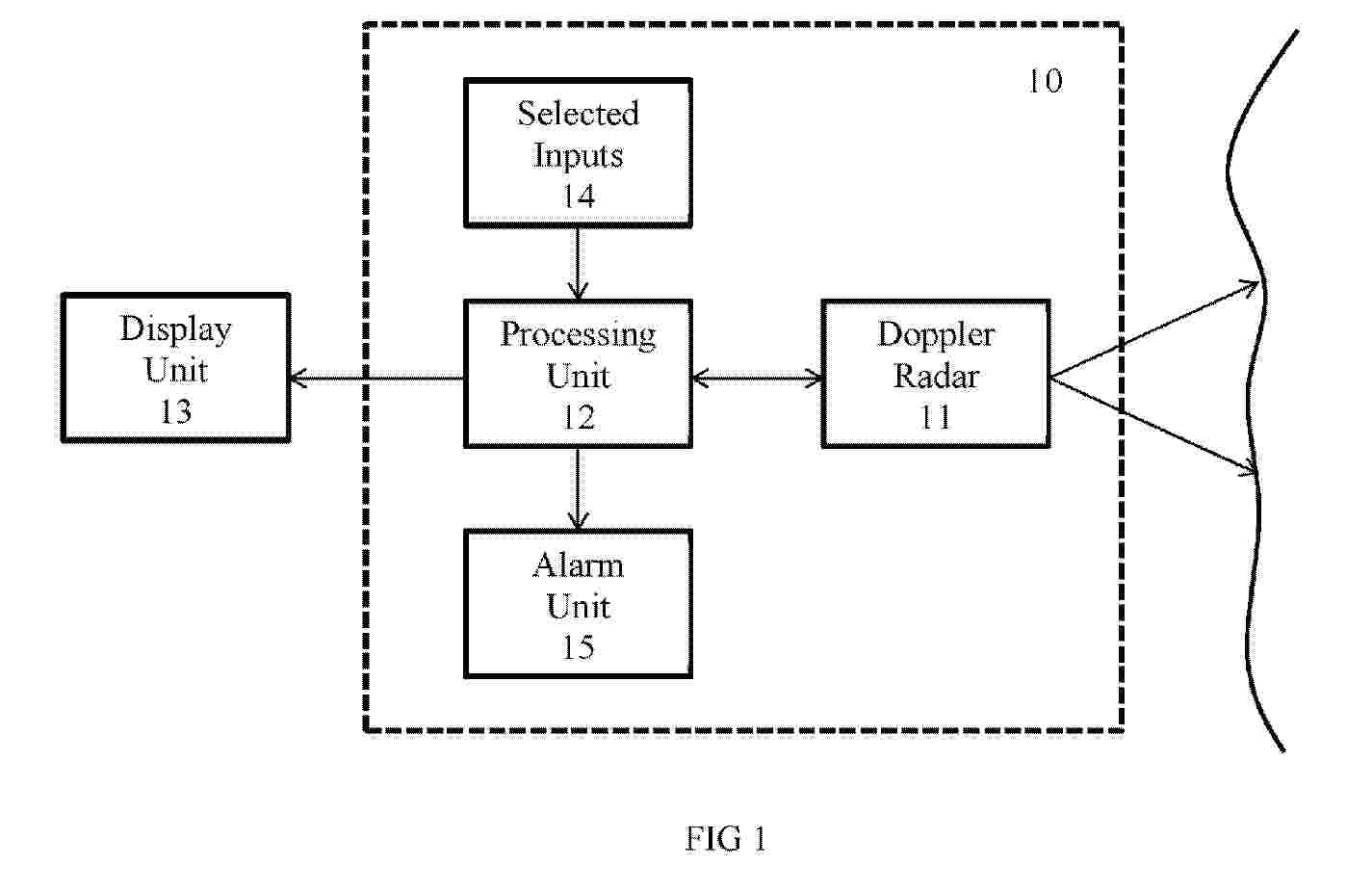
Resumen de: WO2024221042A1
A rock fall monitor based on a Doppler radar that acquires range data of moving radar targets in a field of view. Range data received from the Doppler radar is processed in a processing unit to identify which moving radar targets are rock falls, determine a rock fall intensity value and classify rock fall zones based on the rock fall intensity value. The rock fall intensity value is a measure of rock falls over time. The rock fall zones may be, for instance, safe zones, caution zones or danger zones. The danger zones may be designated as exclusion zones in certain circumstances. An alarm generator generates an alarm when people or equipment approach, enter or are inside an exclusion zone.
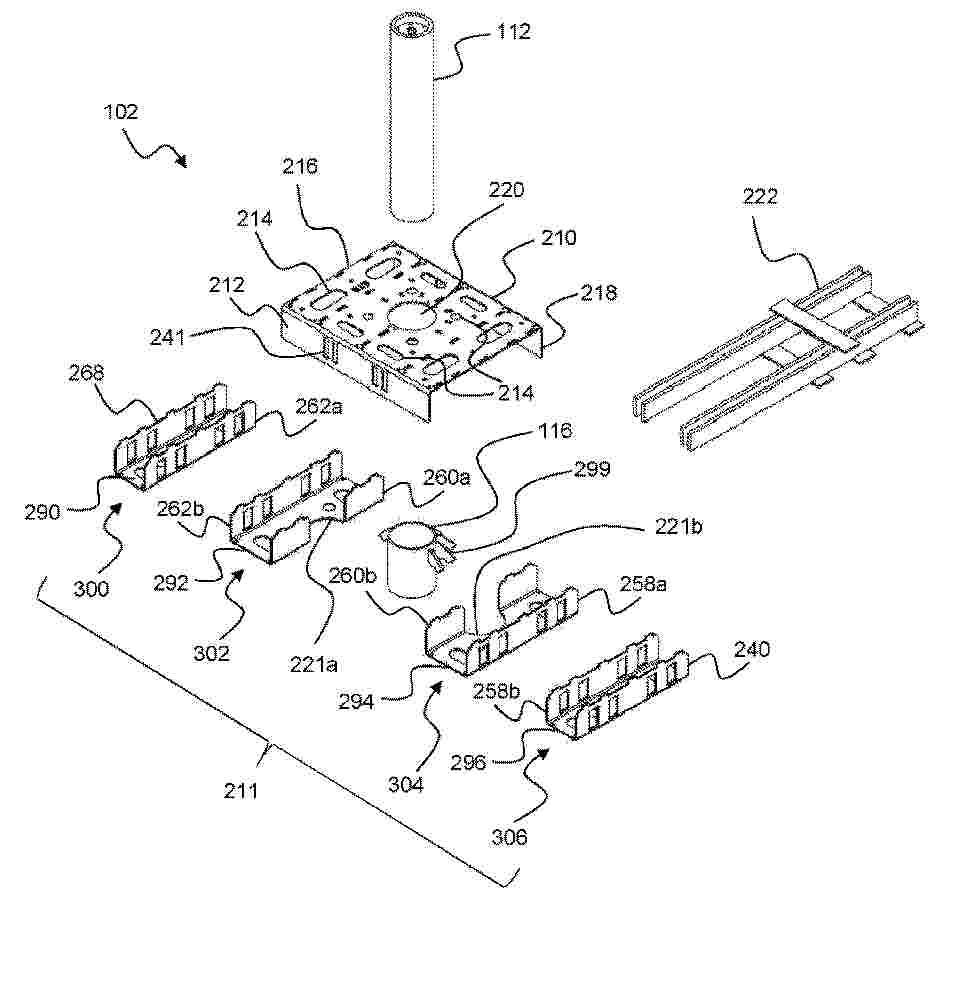
Resumen de: WO2024224047A1
A base member (102) for a bollard (112) comprises first and second rigid elements (302, 304). Each rigid element is integrally formed and comprises a base plate (292, 294) and a wall (262b, 260a, 260b, 258a) extending substantially perpendicularly away from the base plate. The first rigid element is fixed to the second rigid element. A lid (210) is fixed to the first rigid element and/or the second rigid element. The rigid elements and lid collectively form a box section comprising a plurality of chambers (372, 374) defined between the lid, the first rigid element and the second rigid element.
Resumen de: EP4456033A1
The present disclosure relates to a computer-implemented method for gathering and distributing metadata of a surrounding of a vehicle during a ride, the method comprises the steps of, at an apparatus arranged in the vehicle, obtaining, from at least one sensor, sensor data representing at least extracts of the surrounding of the vehicle, generating, from the sensor data, metadata using at least one algorithm module, the metadata comprising at least one feature describing a characteristic of the surrounding, and transmitting the metadata to a remote server. In addition, the present disclosure further relates to a computer-implemented method for gathering and distributing metadata of a surrounding of one or more vehicles, the method comprises the steps of, at a remote server, receiving, from the one or more vehicles, metadata generated using at least one algorithm module, wherein the metadata is derived from sensor data of one or more sensors of the one or more vehicles, and storing the metadata in a storage means of the remote server. Furthermore, the present disclosure relates to a corresponding apparatus, a remote server, computer programs, a vehicle and a vehicle management system.
Resumen de: EP4455609A1
Disclosed are systems for identifying vehicle stop zones. The systems comprise: at least one data storage operable to store at least telematics data and map data; and at least one processor in communication with the at least one data storage, the at least one processor operable to: define a search zone, using the map data, corresponding to a geographical area within which vehicle stop zones are to be identified; identify, using the telematics data, a plurality of vehicle stop points located within the search zone, each of the vehicle stop points representing a location at which a vehicle stopped; dynamically partition the search zone into a plurality of search subzones based at least in part on a number of vehicle stop points present within the search zone; within each search subzone, identify one or more vehicle stop clusters, each vehicle stop cluster comprising at least one of the vehicle stop points; and identify vehicle stop zones by combining vehicle stop clusters that share one or more of the vehicle stop points. Also disclosed are methods for identifying vehicle stop zones and non-transitory computer-readable mediums having instructions stored thereon executable by at least one processor to implement the methods.
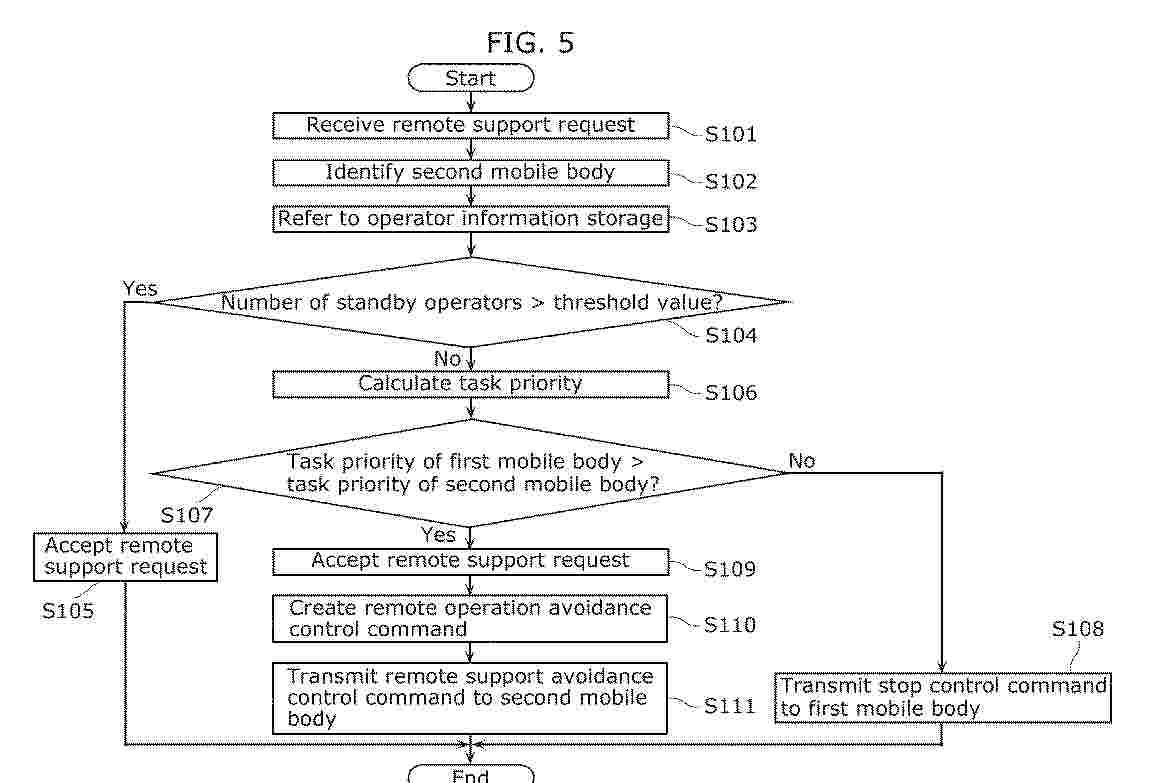
Resumen de: EP4456032A1
A control method according to the present disclosure is performed by a control device for use in remotely monitoring mobile bodies each of which autonomously performs a task, and includes: receiving, from a first mobile body included in the mobile bodies, a remote support request indicating a request for remote operation support (S101); identifying a second mobile body different from the first mobile body (S102); obtaining first and second task information about first and second tasks being performed by the first and second mobile bodies, and calculating priorities of the first and second tasks based on the first and second task information (S106); and when the priority of the first task is lower than that of the second task, transmitting, to the first mobile body, a first control command for remotely operating the first mobile body without hindering the second mobile body from performing the second task (S108).
Resumen de: AU2022419975A1
A mobile terminal system includes equipment used to establish a terminal site with at least one landing pad sized and shaped to accommodate an autonomous vehicle of a fleet. A control subsystem determines that an autonomous vehicle of the fleet is in-bound to the established terminal site. After determining the in-bound autonomous vehicle, landing instructions are determined that indicate a landing pad in which the inbound autonomous vehicle is to stop and a route that the in-bound autonomous vehicle is to travel along to reach the landing pad. The landing instructions are provided to the in-bound autonomous vehicle. The landing instructions cause the in-bound autonomous vehicle to travel along the route to the landing pad.
Resumen de: US2022325487A1
A method for controlling an industrial vehicle comprising the steps of: detecting a physical feature that determines a local narrowing or a widening of said road route; calculating treatment parameters of the road surface adapted to be used in the presence of said physical feature; calculating an estimated time for reaching said physical feature; calculating a time interval value required for a complete implementation of the second treatment parameters; and starting the implementation of the second treatment parameters at a time that is equal to the estimated time excluding the time interval of complete implementation.
Resumen de: CA3128477A1
An anchorless crash cushion apparatus having a plurality of interconnected water-filled crash cushion elements and a non-water filled forward-most cushion element includes vehicle capture structure resisting upward tilting of an impacting vehicle and ramping of the impacting vehicle and stabilizing structure resisting relative rotation between the crash cushion elements in both vertical and lateral planes during vehicle impact. A transition weldment is employed to connect the anchorless crash cushion apparatus to a rigid hazard object.
Resumen de: CA3129614A1
An anchorless crash cushion apparatus having a plurality of interconnected water-filled crash cushion elements and a non-water filled forward-most cushion element includes vehicle capture structure resisting upward tilting of an impacting vehicle and ramping of the impacting vehicle and stabilizing structure including a midnose structure resisting relative rotation between crash cushion elements in both vertical and lateral planes during vehicle impact.
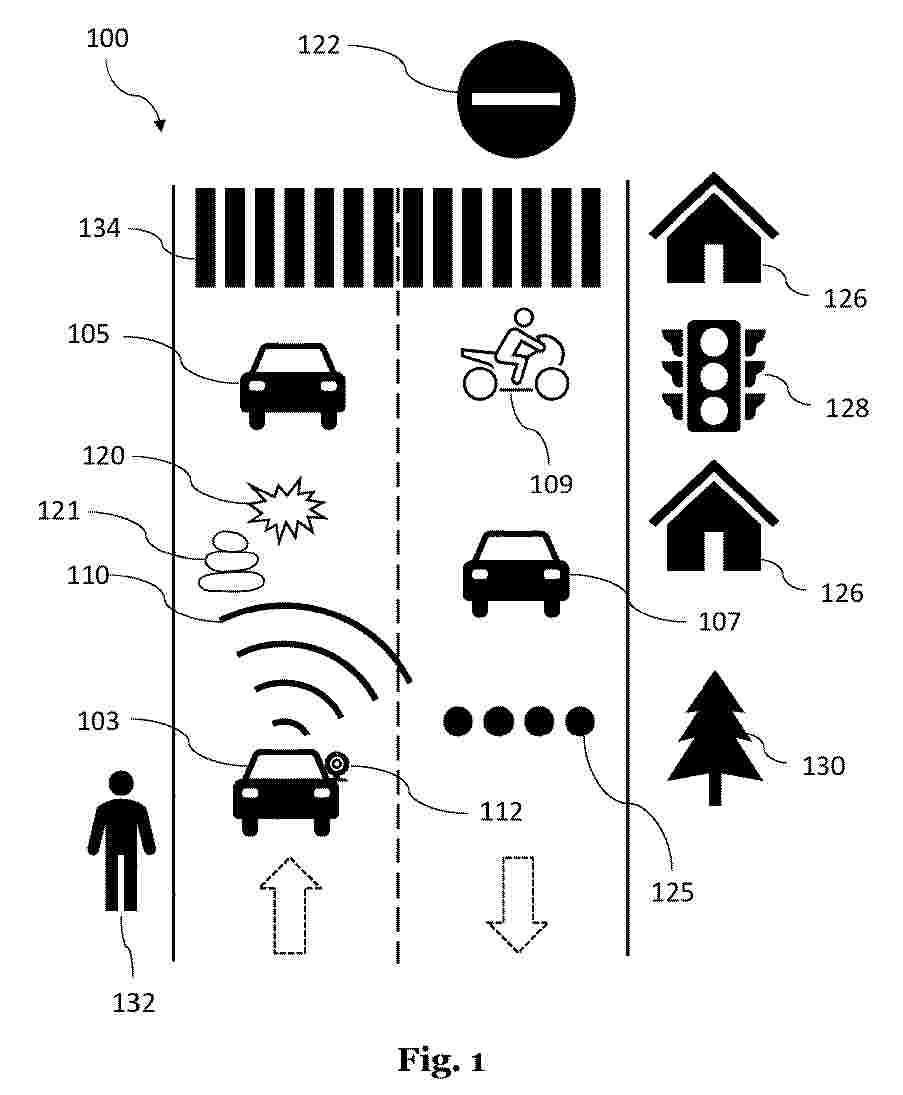
Resumen de: WO2024220997A2
A predictive dynamic alert, control, and management system configured to detect traffic members through a plurality of sensor nodes and transponders in hazardous environments, learn and predict traffic paths and traffic habits of traffic members, and provide advance warning and advance action and control signals to prevent traffic accidents, is provided.
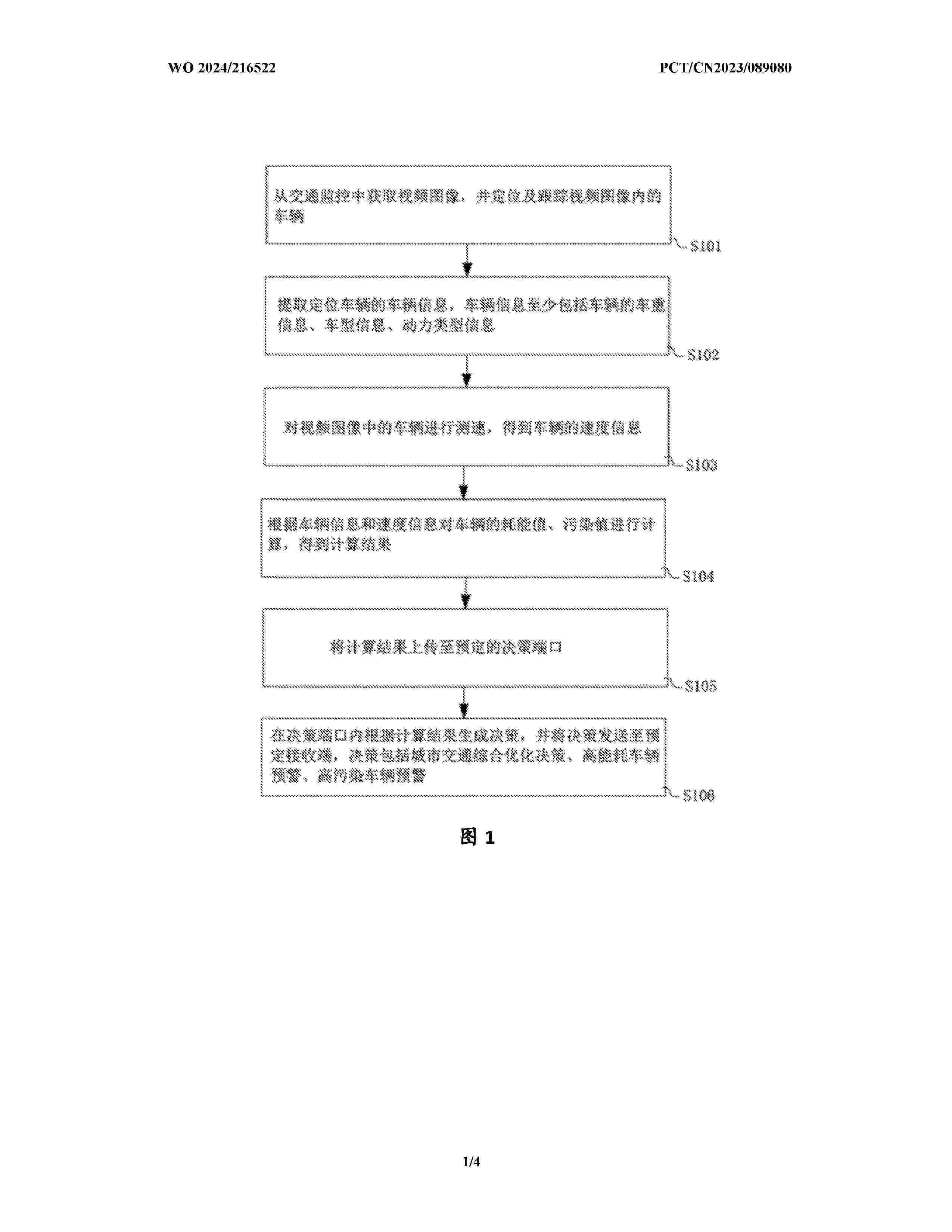
Resumen de: WO2024216522A1
Disclosed in the present invention are a traffic energy consumption monitoring and management method and system, an electronic device, and a storage medium. The method comprises: acquiring a video image from traffic monitoring, and positioning and tracking a vehicle in the video image; extracting vehicle information of the positioned vehicle, wherein the vehicle information at least comprises vehicle weight information, vehicle type information and power type information of the vehicle; measuring the speed of the vehicle in the video image to obtain speed information of the vehicle; calculating an energy consumption value and a pollution value of the vehicle according to the vehicle information and the speed information to obtain calculation results; uploading the calculation results to a predetermined decision port; and generating a decision in the decision port according to the calculation results, and sending the decision to a predetermined receiving end, wherein the decision comprises an urban traffic comprehensive optimization decision, high-energy-consumption vehicle early warning, and high-pollution vehicle early warning. The present invention can solve the problem of calculation of vehicle energy consumption loss and pollution in hybrid power heterogeneous traffic scenarios, and implement monitoring and quantification of energy consumption and pollution of vehicles in urban areas.
Resumen de: WO2024219525A1
The present invention relates to an auxiliary traffic device control system and, more particularly, to an independent auxiliary traffic device control system that can control auxiliary traffic devices, such as a pedestrian operation signal, a floor traffic light, a pedestrian signal extension system, and a pedestrian speech guidance device. According to embodiments of the present invention, provided is an auxiliary traffic device control system including an auxiliary traffic device controller that can communicate with a main traffic signal controller for controlling traffic lights, and the auxiliary traffic device controller is provided. The auxiliary traffic device controller comprises: a first communication unit for communicating with a main traffic signal controller; a second communication unit for communicating with auxiliary traffic devices connected to the auxiliary traffic device controller to enable communication therebetween; a power supply unit for supplying power to the auxiliary traffic device controller; and an auxiliary control unit for controlling the first communication unit and the second communication unit.
Resumen de: WO2024220000A1
The invention relates to devices for visually guiding road users, and more particularly to road signalling and delineating devices. A road delineating device includes a shock-absorbing part consisting of a set of shock-absorbing elements with through-holes, and a mount encircled by said shock-absorbing elements, and further comprises metal posts which pass through the entire set of shock-absorbing elements and have a baseplate at the bottom and a mounting plate at the top with a threaded hole for tensioning the shock-absorbing elements using a threaded fastening element, wherein the shock-absorbing elements have light-reflecting elements on the outer surface thereof. The technical result is an increase in safety for all road users by virtue of the design of the resilient signalling and delineating device.
Resumen de: WO2024218000A1
System (100) for regulating road traffic, comprising means for controlling at least one light segment (134) composed of a plurality of light indicators (1341) that emit light signals (1342a-c) forming a plurality of light points moving at a speed representative of a speed setpoint.
Resumen de: CN118434812A
A packaged tape includes a tape having a length, such as a road marking tape having a base tape, an adhesive, and a liner. The strap includes a first end and a second end opposite the first end. The belt is folded into a colorful arrangement structure, and the second end of the belt can be used for being connected with the first end of another belt folded into the colorful arrangement structure. The second end can be spliced with an end of another packaged tape in the coloured arrangement when the packaged tape is being dispensed and applied, or before it.
Resumen de: US2024335946A1
In an example, a method comprises receiving a digital representation of a floor plan to be printed by a surface marking robot guided using a remote guiding system, receiving guiding system position information, and receiving obstacle information identifying an obstacle. The method also comprises identifying a specific floor plan feature of the digital representation which intersects a shadow region of the obstacle from a guiding system point of view, and, in response to this, modifying the digital representation to produce a second digital representation, whereby the specific floor plan feature is either deleted or modified in the second digital representation, the modified floor plan feature excluding at least a portion of the specific floor plan feature in the shadow region. The method also comprises operating the surface marking robot to print the second digital representation using the guiding system.
Resumen de: CA3128475A1
An anchorless crash cushion apparatus having a plurality of interconnected water-filled crash cushion elements and a non-water filled forward-most cushion element includes vehicle capture structure resisting upward tilting of a frontally impacting vehicle and ramping of the frontally impacting vehicle and stabilizing structure resisting relative rotation between the crash cushion elements in both vertical and lateral planes during vehicle impact, External elongated deformable structural members extend along the sides of the crash cushion elements and bend outwardly away from the crash cushion elements during frontal vehicle impact.
Nº publicación: ES2983179T3 22/10/2024
Solicitante:
VOESTALPINE KREMS FINALTECHNIK GMBH
voestalpine Krems Finaltechnik GmbH
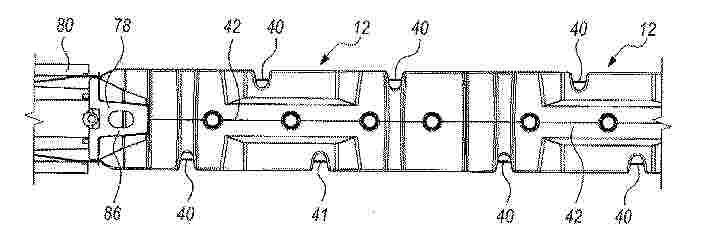
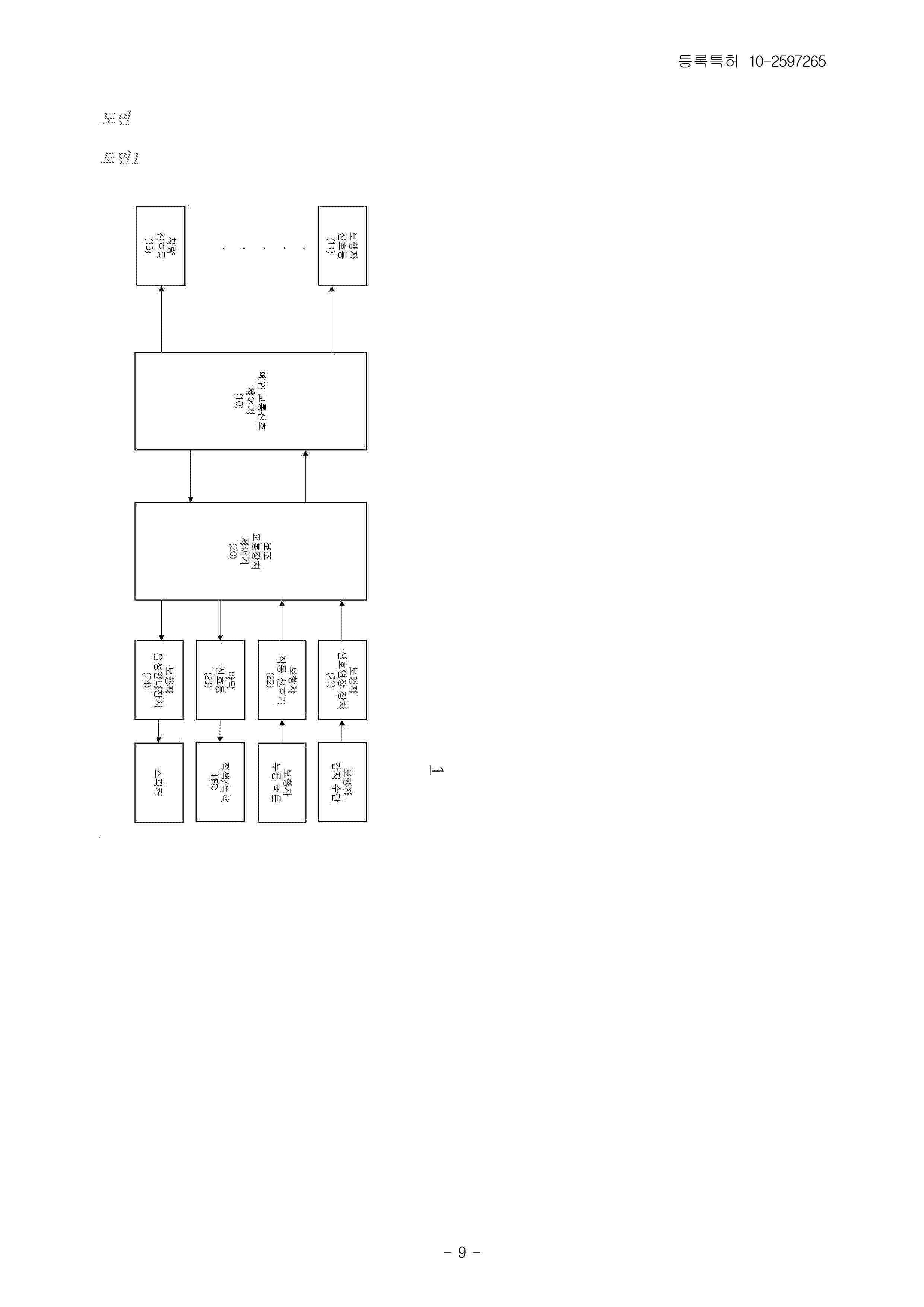
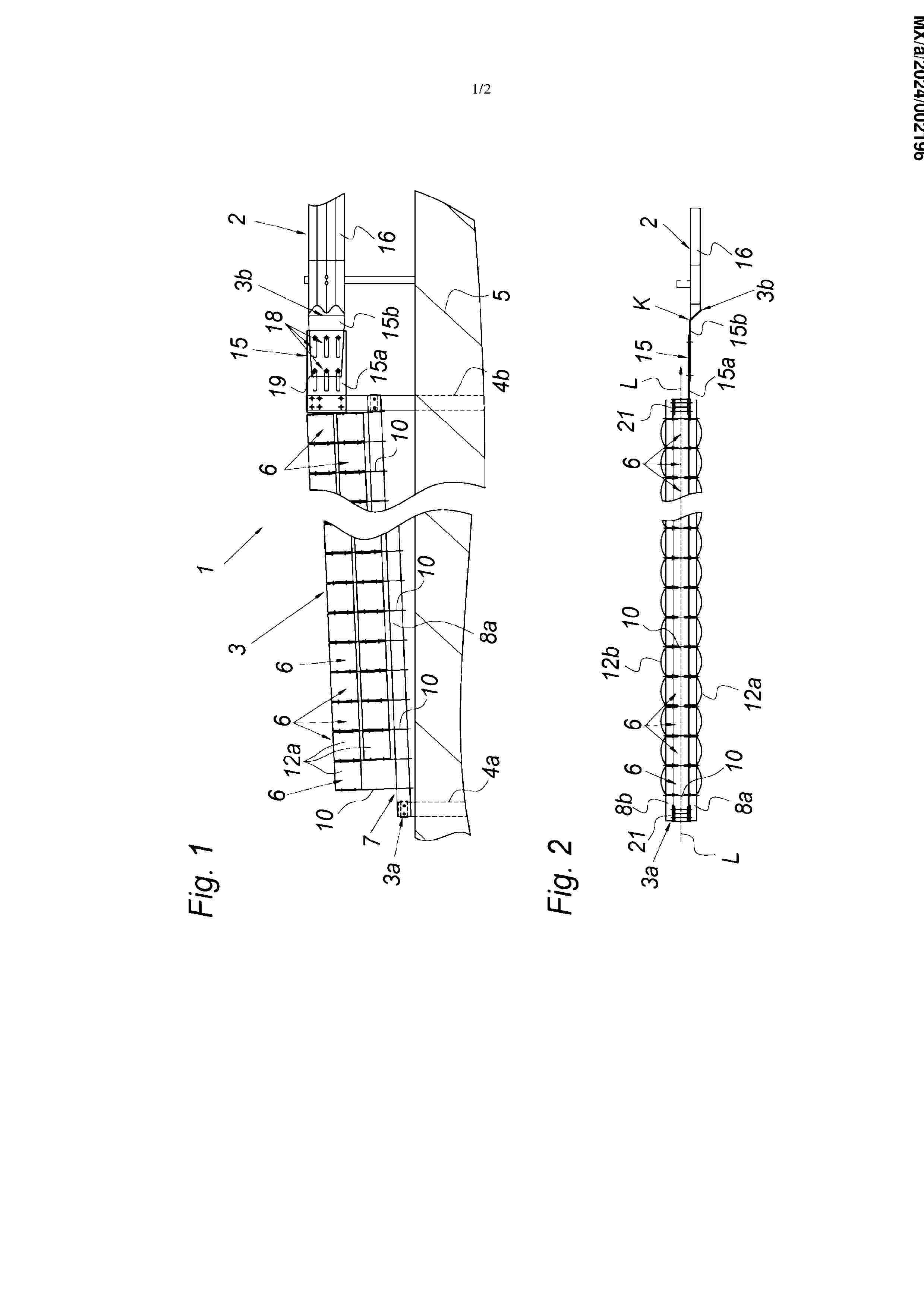
Resumen de: MX2024002196A
The invention relates to a terminal having a connection end (3b) for connecting the terminal to a vehicle restraint system (1), the terminal comprising a linear guide (7), which rises in the manner of a ramp toward the connection end (3b) in the longitudinal direction (L) of the terminal (3), and comprising a plurality of damper elements (6), which are disposed one following the other in a row and which are movably mounted on the linear guide (7). According to the invention, in order that impact energy is stably absorbed even in the case of unfavorable impact angles, the damper elements (6) have guide plates (10), and the linear guide (7) in the guide plates (10) guide cutouts (9a, 9b) and has at least two mutually parallel longitudinal profiles (8a, 8b), which pass through said guide cutouts (9a, 9b) for movable mounting of the damper elements (6).
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica